卒業研究のご紹介
2021年版
情報系所属学生
RTK-GPSと加速度センサを用いた路面状態共有に関する研究
小川 真輝神奈川県
大学院情報工学専攻 博士前期課程2021年3月修了
(情報学部情報工学科2019年3月卒業)
(情報学部情報工学科2019年3月卒業)
神奈川県 横浜隼人高等学校出身
研究の目的
位置情報は今日の生活において必要不可欠な情報の一つであり、カーナビゲーションシステムなどで広く活用されている。また、GPSは今後も屋外位置測位において高精度な測位が可能になることが期待される。路面評価に関して、公道などは路面状態の維持・管理が定期的に行われており整備が充実しているが、住宅地の歩道などの場所は整備が行き渡っていない。そこで、路面評価した位置の特定を行うことで、路面状況を確認して歩行上の危険を避けることができると考えた。
本研究ではリアルタイムに高精度な測位を行うことができるRTK測位技術を用いることとし、また、振動加速度による路面凹凸状況を判定することとした。以上の二つを組み合わせWeb上に共有を行うことを最終目標として研究を行った。
本研究ではリアルタイムに高精度な測位を行うことができるRTK測位技術を用いることとし、また、振動加速度による路面凹凸状況を判定することとした。以上の二つを組み合わせWeb上に共有を行うことを最終目標として研究を行った。
研究内容や成果等
■ 路面状態共有システム
自動車に搭載したスマートフォンのGPSなどを利用した位置特定が多く行われている。しかし、通学路やサイクリングロードなどでは、位置把握を行うには測位精度が不十分という問題がある。著者らは、RTK測位による高精度測位を用いて位置把握を行うこととした。また、自転車に搭載した加速度センサを用いて路面を評価し、路面評価結果をWeb上で共有を行うことにした。システムコンセプトを図1(省略)に示す。
■ RTK測位の実現と検証
近年利用されつつあるRTK測位では、静止状態での測位誤差が数cmであり、移動中に測位を行っても20cmから数m以内に測位誤差を抑えることができると言われているため今回、RTK測位技術を採用することにした。
(1) RTK測位の実験系と環境構築
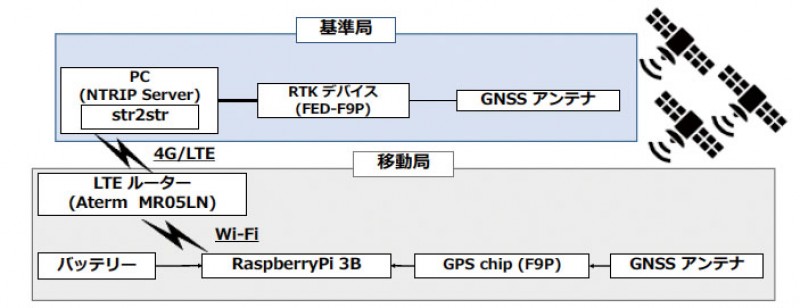
RTK測位を行うための実験構成を図2に示す。一般的に基準局と移動局は距離が離れていることから、補正情報を4G/LTEで取得する必要があり、LTEルータを媒体として受信を行うこととした。基準局は本学内に設置したものを使用し、LTEルータのテザリング機能により基準局と測位端末であるRaspberry PIの接続を行った。測位にはRTKエンジンを使用している。
(1) RTK測位の実験系と環境構築
RTK測位を行うための実験構成を図2に示す。一般的に基準局と移動局は距離が離れていることから、補正情報を4G/LTEで取得する必要があり、LTEルータを媒体として受信を行うこととした。基準局は本学内に設置したものを使用し、LTEルータのテザリング機能により基準局と測位端末であるRaspberry PIの接続を行った。測位にはRTKエンジンを使用している。
(2)RTK測位実験
(1)で述べた実験構成でのRTK測位システムとして機能・性能確認のため、定点での測位を行った。結果として、本構成において基準局からの補正情報を取得し、35mm範囲内の変動に抑えることができた。
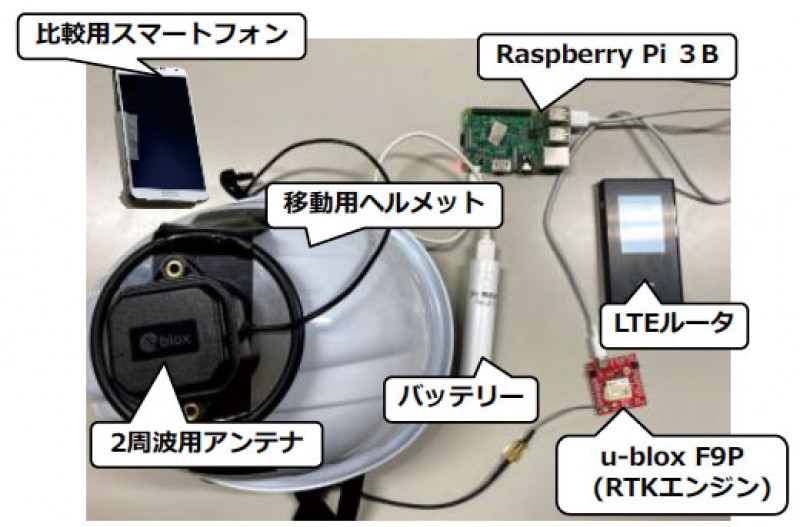
一般的に、基準局と移動局との距離が長くなるほど、測位精度が低下すると言われている。そこで、距離が変化しても測位精度が維持できるかを確認するため、大学の基準局から0.2、2.0、5.0、8.6kmの距離を選定し実験を行った。図3に実際に使用した機器を示す。
実験結果の代表例として、相模川に隣接する歩道(基準局から8.6km)の地図上に測位結果を表示したものを図4(省略)に示す。RTKによる測位結果では、実際の歩行経路を地図上に反映していることを確認した。しかし、スマートフォンの結果の精度は維持されず歩行履歴が実際のルートから外れる場合が散見された。
(1)で述べた実験構成でのRTK測位システムとして機能・性能確認のため、定点での測位を行った。結果として、本構成において基準局からの補正情報を取得し、35mm範囲内の変動に抑えることができた。
一般的に、基準局と移動局との距離が長くなるほど、測位精度が低下すると言われている。そこで、距離が変化しても測位精度が維持できるかを確認するため、大学の基準局から0.2、2.0、5.0、8.6kmの距離を選定し実験を行った。図3に実際に使用した機器を示す。
実験結果の代表例として、相模川に隣接する歩道(基準局から8.6km)の地図上に測位結果を表示したものを図4(省略)に示す。RTKによる測位結果では、実際の歩行経路を地図上に反映していることを確認した。しかし、スマートフォンの結果の精度は維持されず歩行履歴が実際のルートから外れる場合が散見された。
■ 路面状態の取得と検証
(1)路面評価の実験系の構成と環境構築
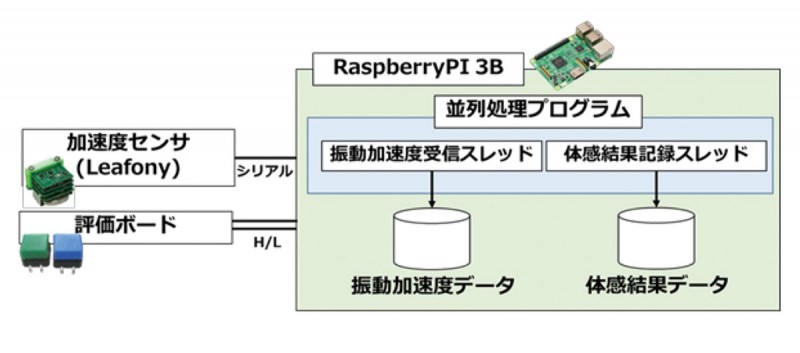
図5に路面状態取得実験システムの構成を示す。振動加速度と体感による評価との相関関係を確認するために、体感による評価を入力するための自作ボタンを設計して実装することにした。本ボタンには、道路状況の体感に応じて「良い」と「悪い」の2種類を入力できるようにした。振動加速度受信スレッドと体感結果記録スレッドを同時に実行する並列処理プログラムを実装した。
図5に路面状態取得実験システムの構成を示す。振動加速度と体感による評価との相関関係を確認するために、体感による評価を入力するための自作ボタンを設計して実装することにした。本ボタンには、道路状況の体感に応じて「良い」と「悪い」の2種類を入力できるようにした。振動加速度受信スレッドと体感結果記録スレッドを同時に実行する並列処理プログラムを実装した。
(2)路面状態評価実験
路面状態の比較として、大学内の路面凹凸が小さい道路と駐車場横の路面凹凸が大きい道路を選定し実験を行った。また、年齢差により体感評価が異なる可能性を考慮し、20代男性と60代男性を対象に実験を行った。
図6(省略)に、一例として20代の男性が取得した、路面の凹凸が小さい道路と大きい道路の振動加速度のデータ波形を示す。路面の凹凸が小さい道路では鉛直方向の振動加速度の変動が少ないが、凹凸の大きい道路では振動加速度が大きく変動していることを確認した。
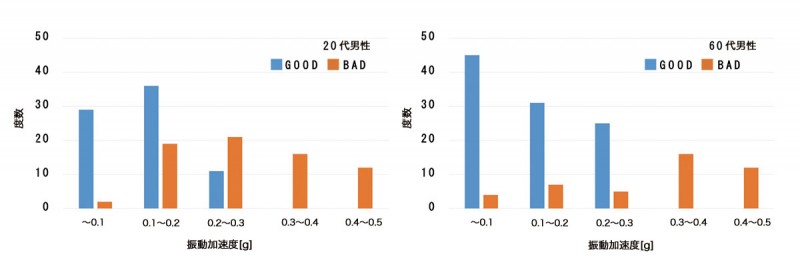
図7に、各実験参加者の振動加速度のRMS値による体感評価の度数分布を示す。ボタンによる体感による評価が入力されたセクションごとにRMS値を計算し、0.1g間隔ごとに評価結果をカウントしている。
この結果より、振動加速度データと体感評価の両方の観点から、路面状態の品質は、振動加速度値から得られたRMS値、つまり0.2 gRMS以下が「良」であると推定できることが明らかとなった。自転車の変更や実験参加者を増やすことより判定の方法の高精度化の必要があるが、現段階の検証結果としては0.2gから0.3gRMSの領域は「不明瞭」と評価され、0.3g以上は「不良」と評価できる。
路面状態の比較として、大学内の路面凹凸が小さい道路と駐車場横の路面凹凸が大きい道路を選定し実験を行った。また、年齢差により体感評価が異なる可能性を考慮し、20代男性と60代男性を対象に実験を行った。
図6(省略)に、一例として20代の男性が取得した、路面の凹凸が小さい道路と大きい道路の振動加速度のデータ波形を示す。路面の凹凸が小さい道路では鉛直方向の振動加速度の変動が少ないが、凹凸の大きい道路では振動加速度が大きく変動していることを確認した。
図7に、各実験参加者の振動加速度のRMS値による体感評価の度数分布を示す。ボタンによる体感による評価が入力されたセクションごとにRMS値を計算し、0.1g間隔ごとに評価結果をカウントしている。
この結果より、振動加速度データと体感評価の両方の観点から、路面状態の品質は、振動加速度値から得られたRMS値、つまり0.2 gRMS以下が「良」であると推定できることが明らかとなった。自転車の変更や実験参加者を増やすことより判定の方法の高精度化の必要があるが、現段階の検証結果としては0.2gから0.3gRMSの領域は「不明瞭」と評価され、0.3g以上は「不良」と評価できる。
(3)RTK測位と加速度を用いた路面状態共有
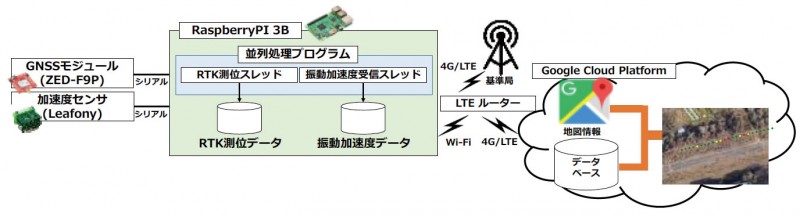
図8に、著者が検討している路面状態共有システムの構成を示す。「RTK測位の実現と検証」と「路面状態の取得と検証」で構築したサブシステムを組み合わせ、並列処理により路面からの位置情報と振動加速度情報を同時に取得する。振動加速度情報に基づく路面の評価は、「路面状態の取得と検証」(2)の結果に基づいて判断する。
今回設計・検証した測位情報や路面情報をクラウドからの地図情報とリンクさせることで、共有システムを構築することができる。
図8に、著者が検討している路面状態共有システムの構成を示す。「RTK測位の実現と検証」と「路面状態の取得と検証」で構築したサブシステムを組み合わせ、並列処理により路面からの位置情報と振動加速度情報を同時に取得する。振動加速度情報に基づく路面の評価は、「路面状態の取得と検証」(2)の結果に基づいて判断する。
今回設計・検証した測位情報や路面情報をクラウドからの地図情報とリンクさせることで、共有システムを構築することができる。
■ まとめ
市街地の通学路やサイクリングロードの路面情報共有を実現するために、RTK測位と振動加速度による路面状態共有システムを提案した。RTK測位では、基準局からの距離変化に基づくRTK測位精度評価実験を行い、システム構築の上で必要となる精度を確保できることを確認した。また、振動加速度や体感評価の相関性を確認する実験を行い、振動加速度データに基づく標準偏差と体感評価との間には相関関係があり、路面状態評価の基準を設けられることを確認した。以上のことより、路面情報共有システム実現の見通しを得た。

大学院に進学後は、修士としての自覚が芽生え、研究室環境の構築や運営も行いました。また研究内容はRTK測位技術とセンサを用いた研究であり、本研究室としては立ち上げの研究だったため基本的なものから準備し、自分の案や研究内容を外部に発表する機会を多くいただきました。これらの経験が自分を成長させ、今後の人生においても大きな意味や糧になると思っています。