卒業研究のご紹介
2020年版
機械・自動車・ロボット系所属学生
共同人間機械協調運転におけるフィードバックゲインに関する研究
清水 雅也(代表者)群馬県
創造工学部自動車システム開発工学科
2020年3月卒業
2020年3月卒業
群馬県立前橋東高等学校出身
菅野 大地福島県
創造工学部自動車システム開発工学科
2020年3月卒業
2020年3月卒業
福島県立福島西高等学校出身
研究の目的
近年では自動車の運転支援技術の発展に伴い、日本全体の交通事故件数は減少してきていますが、高齢者ドライバーの事故発生割合は年々増加しています。そのような社会背景から最近、Steering Shared Control(以下SSC)という人間機械協調の運転技術が注目されています。これは制御システムがドライバーの操舵操作をアシストしてあげることにより、人と機械が協調し、より安全で滑らかな運転を目指す制御となっています。
SSCは従来研究において既に高齢者への有効性が報告されています。そこで、本研究ではSSCの一般ドライバーへの拡張を考え、より厳しい操舵回避条件を想定した場合の規範ドライバーモデルの設定の考え方とSSCによるアシスト操舵トルクのフィードバックゲインの適性や受容性を明確にすることを目的としました。
SSCは従来研究において既に高齢者への有効性が報告されています。そこで、本研究ではSSCの一般ドライバーへの拡張を考え、より厳しい操舵回避条件を想定した場合の規範ドライバーモデルの設定の考え方とSSCによるアシスト操舵トルクのフィードバックゲインの適性や受容性を明確にすることを目的としました。
研究内容や成果等
■ Steering Shared Controlの原理
Steering Shared Control(以下SSC)はドライバーの操舵操作をアシストする事により、適切な運転に導くことを目指した協調制御である。
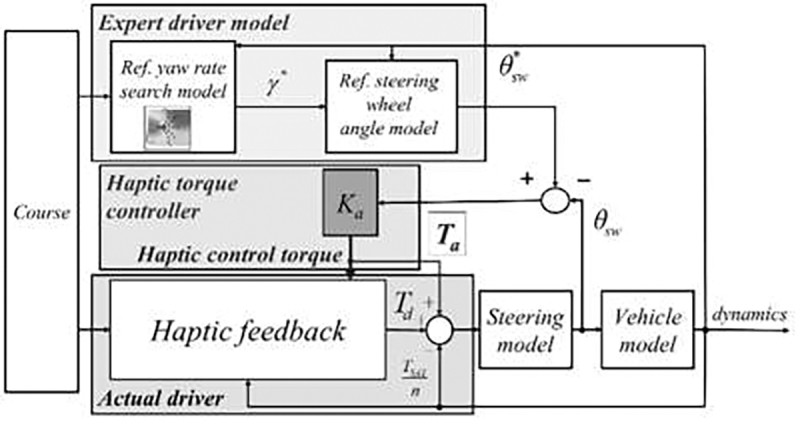
SSCは実ドライバーへ制御システムが運転アシストを行う。制御システムの規範操舵角θ*swとドライバーが行う実操舵角θswの差分を能動的なトルクTaとしてステアに返すという原理である。制御モデルを図1、 θ*swの導出式を(1)、SSC の基本式を(2)式に示す。
SSCは実ドライバーへ制御システムが運転アシストを行う。制御システムの規範操舵角θ*swとドライバーが行う実操舵角θswの差分を能動的なトルクTaとしてステアに返すという原理である。制御モデルを図1、 θ*swの導出式を(1)、SSC の基本式を(2)式に示す。

hは規範ドライバー操舵ゲイン、τLは一次遅れ時定数、Yrefは規範ドライバー目標軌跡、YcはY方向車両軌跡、Tpは規範ドライバー前方注視時間、Vは車速、ψは車両ヨー角である。KaはSSCゲインである。

■ 実験方法
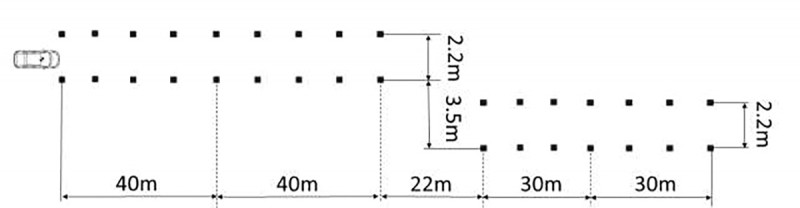
SSCモデルを実装した自動操舵可能な実験車を用いて、図2の設定コースで実験を行った。回避距離は従来の27mを、今回22mに短縮、更に車線幅を2.2m(従来2.5m)とし、緊急度を増した。速度は40km/h一定。パネラーは一般ドライバー4名。
今回の様な急な飛出しを想定したクローズドループ試験では、コースの設定だけではドライバーが目視したコースから予測し操舵してしまう。この影響を排除する為に、光電センサを使い後輪が通過したタイミングで車内前方のLEDを発光させ、パネラーが同位置で知覚反応した操舵回避となるようにした。
今回の様な急な飛出しを想定したクローズドループ試験では、コースの設定だけではドライバーが目視したコースから予測し操舵してしまう。この影響を排除する為に、光電センサを使い後輪が通過したタイミングで車内前方のLEDを発光させ、パネラーが同位置で知覚反応した操舵回避となるようにした。
■ 実験結果
(1)規範ドライバーモデルの決定方法
規範ドライバーモデルを決定するために、経験豊富な熟練ドライバーに本コース条件での操舵回避をしてもらった。その結果、熟練ドライバーのコース取りはシステムが生成してきた目標軌跡と異なりLane Change (以下LC)後の最初のパイロンの手前に目標を置いて安全余裕をとり、パイロンレーン進入時には車両を真直ぐに向け安定させていることがわかった(図3)。この結果より、規範ドライバーモデルのパラメータτLを、従来軌跡を想定した0.25だけでなく、車両全長分相当手前に目標軌跡を置いた0.116の2水準で、SSCゲイン水準 (Ka= 0, 0.07, 0.10, 0.15) を変え、SSCの効果を確認した。
規範ドライバーモデルを決定するために、経験豊富な熟練ドライバーに本コース条件での操舵回避をしてもらった。その結果、熟練ドライバーのコース取りはシステムが生成してきた目標軌跡と異なりLane Change (以下LC)後の最初のパイロンの手前に目標を置いて安全余裕をとり、パイロンレーン進入時には車両を真直ぐに向け安定させていることがわかった(図3)。この結果より、規範ドライバーモデルのパラメータτLを、従来軌跡を想定した0.25だけでなく、車両全長分相当手前に目標軌跡を置いた0.116の2水準で、SSCゲイン水準 (Ka= 0, 0.07, 0.10, 0.15) を変え、SSCの効果を確認した。

(2)従来規範ドライバーモデルでのSSC結果
従来規範ドライバーモデルの結果を図4-6に示す(略)。SSC適用により初期の操舵は、マニュアル時より早く操作を行っており、SSCの効果が確認された。しかし、後半では、パイロンに向って斜めに進入しており、十分に横移動できたとは言えない。これは、図3に示した目標とする軌跡の設定でτLを同定したことに課題があったと言える。
(3)新規規範ドライバーモデルでのSSC結果
新規ドライバーモデルの結果を図7-9に示す(略)。目標軌跡分岐点を手前にし、τLを同定することでSSC適用により操舵入力がマニュアル運転時と比べて早くなっていることに加え、切戻し時まで連続的に位相が進んでおり、一次遅れ系の安定したパイロンへの進入が得られている。更に、Shared control gain Kaが大きくなるに従って人間ドライバーとの協調性能も向上していく。これは、今回の回避条件の設定がより緊急度の高い場面に相当しているとも言える。このことから、緊急度合が上がるに従って、ゲインKaを上げていくことが適正と考えられる。
従来規範ドライバーモデルの結果を図4-6に示す(略)。SSC適用により初期の操舵は、マニュアル時より早く操作を行っており、SSCの効果が確認された。しかし、後半では、パイロンに向って斜めに進入しており、十分に横移動できたとは言えない。これは、図3に示した目標とする軌跡の設定でτLを同定したことに課題があったと言える。
(3)新規規範ドライバーモデルでのSSC結果
新規ドライバーモデルの結果を図7-9に示す(略)。目標軌跡分岐点を手前にし、τLを同定することでSSC適用により操舵入力がマニュアル運転時と比べて早くなっていることに加え、切戻し時まで連続的に位相が進んでおり、一次遅れ系の安定したパイロンへの進入が得られている。更に、Shared control gain Kaが大きくなるに従って人間ドライバーとの協調性能も向上していく。これは、今回の回避条件の設定がより緊急度の高い場面に相当しているとも言える。このことから、緊急度合が上がるに従って、ゲインKaを上げていくことが適正と考えられる。
■ 結言
既に述べた様に、従来規範ドライバーモデル、新規規範ドライバーモデル共にドライバーの操舵入力を早め誘導できていることが確認できSSCの有効性が検証できた。又、一次の前方注視モデルの自動操舵への応用では、時定数τLを目標とする回避軌跡に沿って同定する必要がある。この時に、熟練ドライバーの知恵に見られるように後半の進入も安定できるように一車長分手前に収束目標点をおくコース取りを反映することが重要であることも検証できた。
今後はセンシングの精度をあげ、目標軌跡を緊急度に対して明確にしていくことが規範ドライバーの同定に重要である。
今後はセンシングの精度をあげ、目標軌跡を緊急度に対して明確にしていくことが規範ドライバーの同定に重要である。
-
 指導教員からのコメント
自動運転・運転支援研究室教授 井上 秀雄
指導教員からのコメント
自動運転・運転支援研究室教授 井上 秀雄
- 本研究は、自動運転の人間・機械協調分野に関する研究です。一般に、熟練ドライバーが上手い運転をするための一要因として、俗に言う「コース取り」に着目した事が面白い点です。回避操舵実験において熟練ドライバーが回避後位置目標を、約一車長分だけ手前に置いてスムーズな回避後の車両挙動に繋げている点が新たな発見となり、これをドライバーモデルとして同定し制御した結果、スムーズな自動運転回避と人間ドライバーを操舵誘導するSteering shared controlの機能が狙い通りになりました。新たな発見と実験により論理検証していく面白さを2人は肌で感じ取り、良い経験になったと思います。社会に出てもこの経験を忘れずに頑張って下さい。
-
 卒業研究学生からの一言
清水 雅也
卒業研究学生からの一言
清水 雅也
- 本研究では実車を用いた試験を行ったので、とても貴重な経験ができました。早い段階から研究の方向性や目的を明確化することによって、より有意義に試験を行うことができました。また、試験データの分析や比較などをどのようにまとめれば相手にわかりやすく伝わるかなど学ぶことがたくさんあったので自分の成長にもつながりました。
- 創造工学部自動車システム開発工学科(大学サイト )
- 教員紹介ページ(大学サイト )
- 研究室ナビ(大学サイト)
