卒業研究のご紹介
2021年版
機械・自動車・ロボット系所属学生
運転環境要因変化がドライバの操舵特性評価に及ぼす影響
中山 祥平神奈川県
大学院機械システム工学専攻 博士前期課程2021年3月修了
(創造工学部自動車システム開発工学科2019年3月卒業)
(創造工学部自動車システム開発工学科2019年3月卒業)
神奈川県 鶴見大学附属高等学校出身
研究の目的
これまで本研究室にて提案されてきた自動車の操舵特性の評価手法は、例えば異なる制御を稼働させた車両に対してレーンチェンジ実験から得られた操舵角・自動車の横変位を使ってドライバをモデル化して同定し、その同定パラメータを用いて定量的に評価する手法であった。本研究では、車両特性はそのままで、ドライバを取り巻くシート、ステアリング径、操舵反力などに変化を与えて実験を行い、運転環境変化がドライバに与える影響を操舵特性と同一方法で評価できるかの検討を行った。またドライバ運転環境の変化が自動車操縦性に与える影響を明らかにし、新たに自動車ではなくドライバの運転環境に変化を与える制御の提案を行った。
研究内容や成果等
■ はじめに
過去研究では、車両応答に対する操舵特性の評価をレーンチェンジ時の実際の操舵角と、車両の横方向運動(軌跡)からドライバモデルとして同定した際のドライバパラメータを用いて定量的に評価してきた。h、τh、τLを次に示す。
h:入力(横変位誤差)に対する出力(操舵角)の大きさ
τh:入力の変化を予測した制御動作の微分動作時間
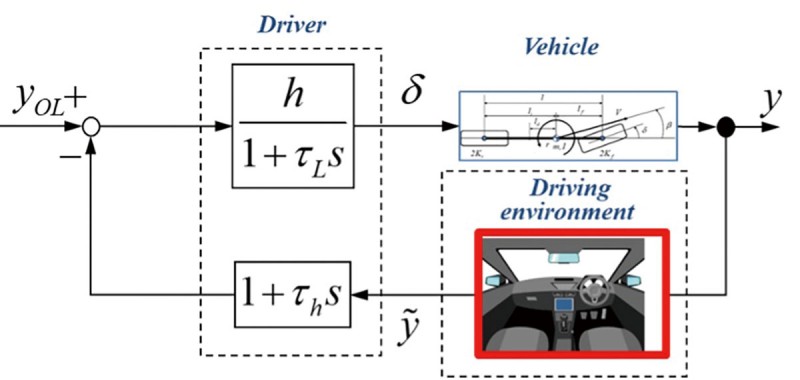
τL:人間の総合的な遅れ時間
Fig.1はレーンチェンジ中における人—自動車系の関係をブロック線図で示し、ドライバが運転環境変化により受ける影響を概念的に記したものである。先行研究にてτLは他のh、τhに比べて車両操舵特性との相関係数が大きいと分かった。
一方、運転環境要因変化(Fig.1の点線の部分)は、クローズドループに陽には入ってこないものの、ドライバの操舵特性に何らかの影響を与えるはずである。そこで本研究では、車両の操舵特性は変化させず、運転環境要因変化をドライバに与える。この変化が操舵特性評価として用いていたτLに影響を及ぼすかを定量的に研究していく。
なお影響があることが分かれば運転環境要因変化の評価にも操舵特性評価τLを使用することができ、評価手法の拡大が可能であると言える。これを概念式で表すと、(1)式のようになり、操舵特性を一定に保つときの運転環境要因変化がτLに影響を及ぼすと言える。

■ 実験方法・実験仕様
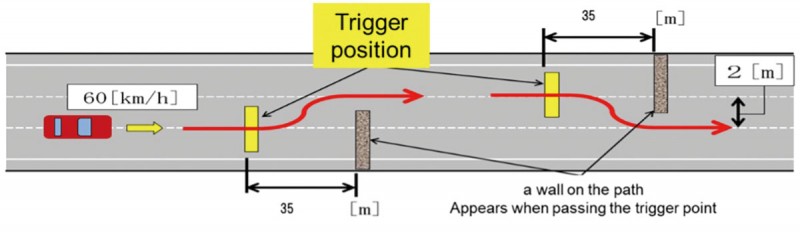

Fig.3のようにトリガー位置を設定し、車両が通過すると壁が出現し、ドライバは避けるために左右にレーンチェンジを行う。
本研究の運転環境変化においてはFig.4に示す部位に対して環境変化を与えた。具体的には①ステアリング径3種、②操舵反力1倍、1.5倍、2倍の3パターン、③バケット、ノーマル、骨盤健康器具などのシート変更による骨盤部分のサポート変更の3パターンである。
④操舵特性変化
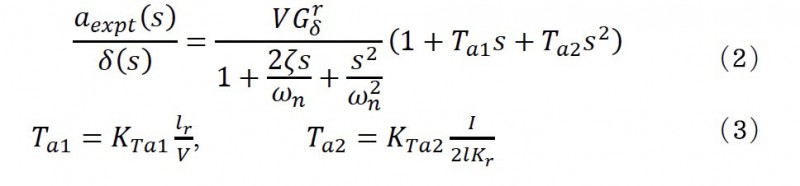
過去研究にてτLに大きな差が生じた横加速度の応答特性を変更する。ヨー運動の応答パラメータを変更せず横加速度の時定数を変更し、ドライバの評価を行った。横加速度は式(2)の伝達関数を用い、式(3)のKTA1とKTA2にはTable1の強調してある3仕様を適用した。
本研究の運転環境変化においてはFig.4に示す部位に対して環境変化を与えた。具体的には①ステアリング径3種、②操舵反力1倍、1.5倍、2倍の3パターン、③バケット、ノーマル、骨盤健康器具などのシート変更による骨盤部分のサポート変更の3パターンである。
④操舵特性変化
過去研究にてτLに大きな差が生じた横加速度の応答特性を変更する。ヨー運動の応答パラメータを変更せず横加速度の時定数を変更し、ドライバの評価を行った。横加速度は式(2)の伝達関数を用い、式(3)のKTA1とKTA2にはTable1の強調してある3仕様を適用した。
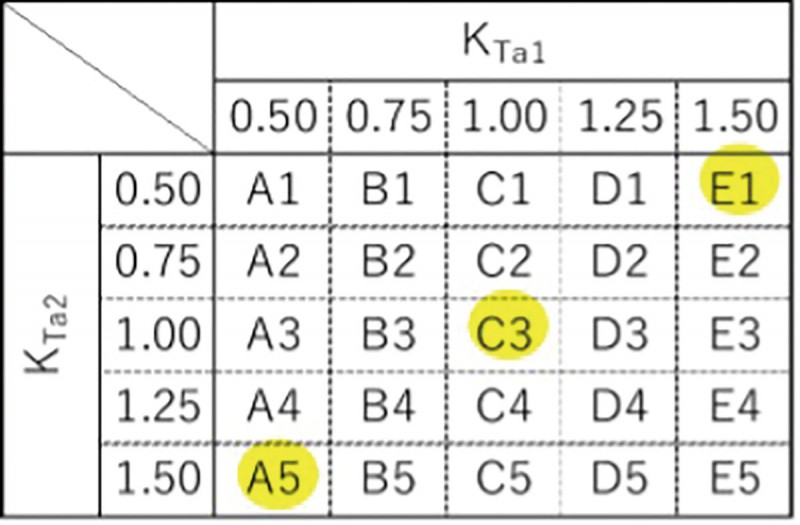
先行研究の結果から、A5、C3、E1も順にτLの値が大きくなっている。
以下、操舵特性仕様としてA5:Low・C3:Middle・E1:Highと定義する。
⑤運転環境要因変化×操舵特性変化
操舵性3種類にて実験を行う。これは操舵特性の違いによって環境要因変化の大きさが変化するかを確かめるものである。
以下、操舵特性仕様としてA5:Low・C3:Middle・E1:Highと定義する。
⑤運転環境要因変化×操舵特性変化
操舵性3種類にて実験を行う。これは操舵特性の違いによって環境要因変化の大きさが変化するかを確かめるものである。
■ 実験結果
①②③では操舵特性は常にMiddleにて行った。
①ステアリング変更実験
DriverA、B、C、Dの実験結果の差が微小であり、ステアリング径の常識的な範囲での変更ではτLには影響しないと考えられる。
②操舵反力変更実験
DriverA、B、C、Dの実験結果の差が微小であり、この範囲の操舵反力変化はτLには影響しないと考えられる。
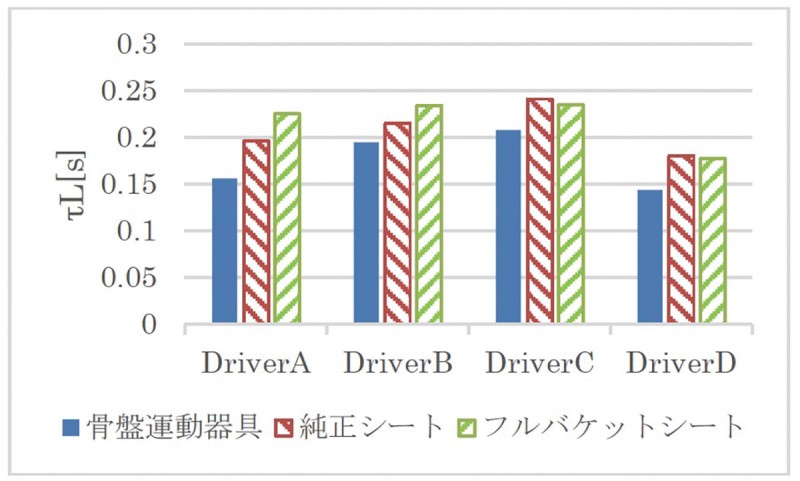
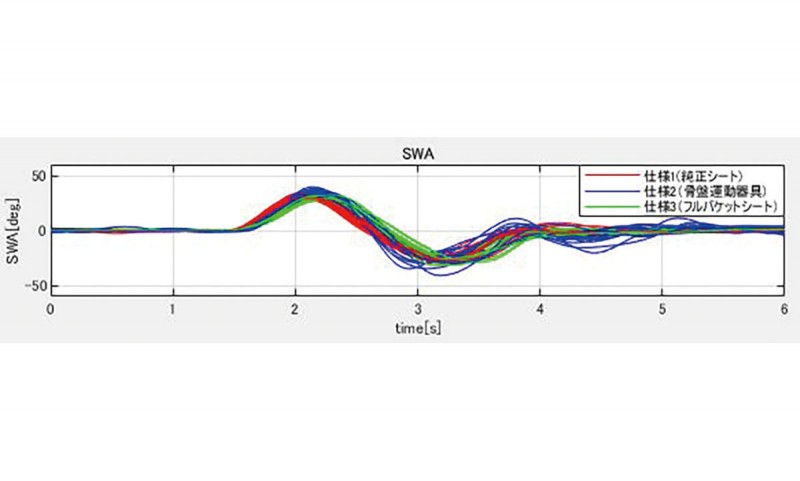
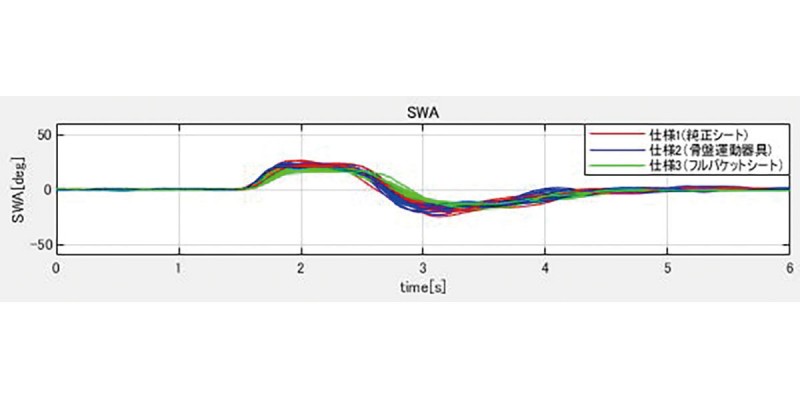
③シート変更実験
Driver A、Bの2名は、骨盤運動器具<基準<フルバケットシートの順でτLの値が大きくなっている。この2人に関しては操縦性が向上したとのコメントがあり、τLも大きくなっている。一方Driver C、Dに関してはフルバケットシートのτLが、基準より小さくなっていた。「フルバケットシートの方が乗りやすい」とのコメントがあったためτLの値が一致しなかった。時刻歴波形図よりDriver B、C、Dでは骨盤運動器具での実験では、身体の不安定さが操舵角に表れていることが分かる。しかしDriver Aに関しては、大きな不安定さは操舵角からは見られなかった。しかし第2操舵時に骨盤運動器具の場合、位相が早くなっていることを確認した。
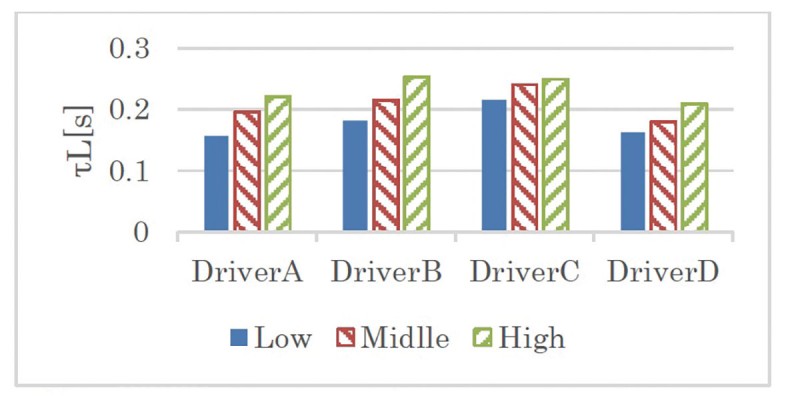
④操舵特性変化
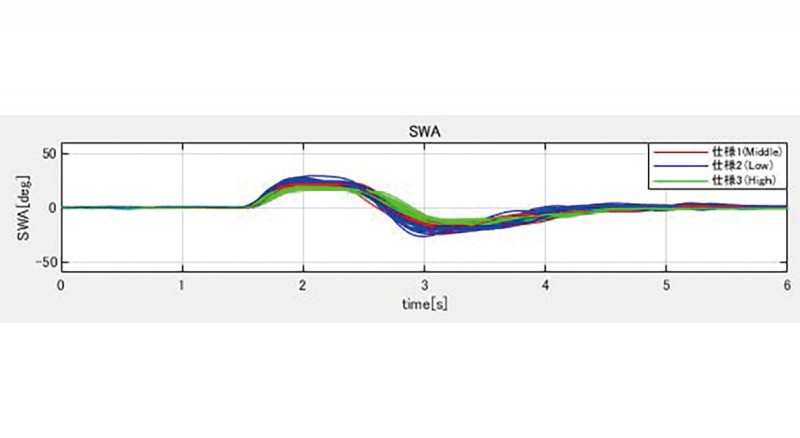
先行研究と同じくLow<Middle<Highの順にτLの値が、大きくなっていることが分かる。この結果は、被験者全員の官能評価順と一致していた。また被験者全員の時刻歴波形図を見ると、全員がτLの値が大きい仕様の順で操舵角が小さくなっていた。
⑤運転環境要因変化×操舵特性変化
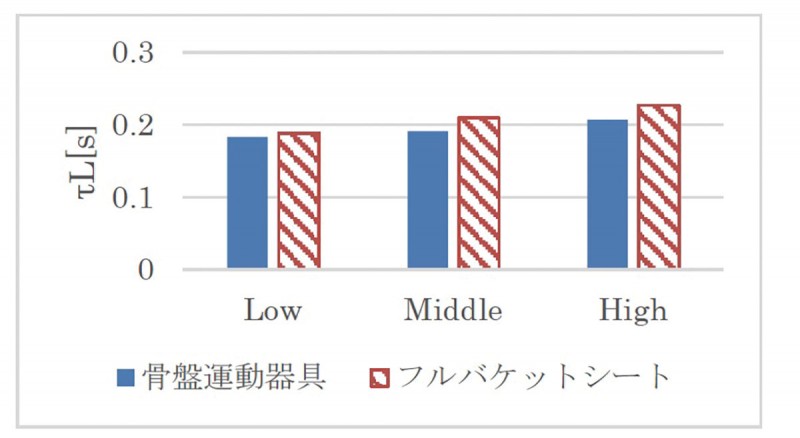
Fig.16ではLow×フルバケットシートとMiddle×骨盤運動器具、Middle×フルバケットシートとHigh×骨盤運動器具のτLの大きさが同じ結果である。これはDriverA以外の被験者でも見られた傾向であり、環境要因変化によるτLへの影響が、操舵応答特性によるτLへの影響より大きくなることが分かった。
①ステアリング変更実験
DriverA、B、C、Dの実験結果の差が微小であり、ステアリング径の常識的な範囲での変更ではτLには影響しないと考えられる。
②操舵反力変更実験
DriverA、B、C、Dの実験結果の差が微小であり、この範囲の操舵反力変化はτLには影響しないと考えられる。
③シート変更実験
Driver A、Bの2名は、骨盤運動器具<基準<フルバケットシートの順でτLの値が大きくなっている。この2人に関しては操縦性が向上したとのコメントがあり、τLも大きくなっている。一方Driver C、Dに関してはフルバケットシートのτLが、基準より小さくなっていた。「フルバケットシートの方が乗りやすい」とのコメントがあったためτLの値が一致しなかった。時刻歴波形図よりDriver B、C、Dでは骨盤運動器具での実験では、身体の不安定さが操舵角に表れていることが分かる。しかしDriver Aに関しては、大きな不安定さは操舵角からは見られなかった。しかし第2操舵時に骨盤運動器具の場合、位相が早くなっていることを確認した。
④操舵特性変化
先行研究と同じくLow<Middle<Highの順にτLの値が、大きくなっていることが分かる。この結果は、被験者全員の官能評価順と一致していた。また被験者全員の時刻歴波形図を見ると、全員がτLの値が大きい仕様の順で操舵角が小さくなっていた。
⑤運転環境要因変化×操舵特性変化
Fig.16ではLow×フルバケットシートとMiddle×骨盤運動器具、Middle×フルバケットシートとHigh×骨盤運動器具のτLの大きさが同じ結果である。これはDriverA以外の被験者でも見られた傾向であり、環境要因変化によるτLへの影響が、操舵応答特性によるτLへの影響より大きくなることが分かった。
■ 考察
本研究にてシート以外の環境要因変化では操舵特性評価への影響は確認できず、あまり操縦性に影響を与えないと考えられる。シートに関する環境要因変化でもその変化が微小であれば操舵特性評価における影響は小さかった。しかし、十分に実験環境に慣れた被験者では身体の不安定さがあると、操舵角に影響が出ており、操縦性に与える影響を明らかにできた。十分にドライビングシミュレータに慣れている被験者では環境要因変化のτLによる評価手法は有効だと考えられ、τLを使って定量的に評価することが可能である。
■ おわりに
シート変更の運転環境要因変化を与えることにより操舵特性評価τLへの影響を確認できた。即ち式(3)のように、操舵特性と同様に運転環境要因変化を、τLを用いて評価することができる。ただし操舵特性変化に比べて操舵特性評価τLへの影響は小さく、実験は十分にドライビングシミュレータに慣れた被験者にて行ったほうが良いことが考えられる。
-
 指導教員からのコメント
車両運動・制御研究室教授 山門 誠
指導教員からのコメント
車両運動・制御研究室教授 山門 誠
- これまで、操舵特性評価を行う際に運転環境要因をできるだけ一定に保ち、異なるハンドリング性能を持つ車両の評価を行ってきた。今回の中山君の研究は、この考え方を180度変化させて同じ性能の車両を用いて運転環境要因変化の差を定量的に評価することができるということを実証した。この研究内容は修了後の5月の自動車技術会の学術講演会で発表され、論文誌への投稿も完了している。中山君は大型車両メーカに就職した。車両運動の研究部署に着任した場合、ぜひ自分で研究した内容の適用を検討してもらいたい。今後の活躍を祈念する。
-
 修士研究学生からの一言
中山 祥平
修士研究学生からの一言
中山 祥平
- 本研究は、これまでまったく明らかにされていないドライバの運転環境に関する研究で右も左もわからない状態でのスタートでした。しかし先生から多くのアドバイスをいただき研究の方向性が決定し、研究に必要な機材なども早急に用意していただきました。また実験にもアドバイスをいただき非常に内容の濃い研究が行うことができたと思います。また研究室を通して多くの外部の方々とも交流させていただき、卒業してからの社会人生活において貴重な経験になったと思います。
- 大学院機械システム工学専攻 博士前期課程(大学サイト )
- 研究室ナビ(大学サイト)
