卒業研究のご紹介
2020年版
機械・自動車・ロボット系所属学生
交通環境モデルを用いた走行リスク予測アルゴリズムの評価手法の研究
張 海鵬外国
大学院機械システム工学専攻 博士前期課程 2020年3月修了
(創造工学部自動車システム開発工学科 2018年3月卒業)
(創造工学部自動車システム開発工学科 2018年3月卒業)
中華人民共和国の学校等出身
研究の目的
現在、運転支援/自動運転システムの実用化に向けて、その効果や安全性評価が課題になっている。その中でも本学が開発に関与した自動車対歩行者・自転車に関する「先読み減速制御」の安全性向上への効果評価は重要である。一般に運転支援/自動運転システムの有効性評価は、テストコースや公道実験にて実施中であるが、数億マイルが必要とも言われており事実上困難である。この様な背景からシステムの実用化には、不確実性・複雑性がある交通環境で正確に実行し、再現性の高い仮想環境での評価シミュレーションが求められている。
そこで本研究では、ミクロ交通シミュレーションにドライバ運転行動リスク指標と交通環境リスク指標を考慮したモデルを組み込み、様々な交通環境を模擬する事による評価手法の提案を行った。複数のソフトウェアを組み合わせた検証・評価フレームワークの構築により、データベース、交通環境モデル、ロードユーザの挙動を再現し、ヒヤリハットが確率的にどの程度減少するかの効果評価を可能にした。更にこの手法により運転支援/自動運転における安全技術の進化の方向性を示すことが可能となる。
そこで本研究では、ミクロ交通シミュレーションにドライバ運転行動リスク指標と交通環境リスク指標を考慮したモデルを組み込み、様々な交通環境を模擬する事による評価手法の提案を行った。複数のソフトウェアを組み合わせた検証・評価フレームワークの構築により、データベース、交通環境モデル、ロードユーザの挙動を再現し、ヒヤリハットが確率的にどの程度減少するかの効果評価を可能にした。更にこの手法により運転支援/自動運転における安全技術の進化の方向性を示すことが可能となる。
研究内容や成果等
■ 評価手法とフレームワーク
(1)評価手法
本研究では、潜在リスクが高い走行条件での支援システムの効果予測に注目する。多発している危険なシナリオとして分類した走行環境モデルを構築することで、先読み減速制御車両と本制御の無い運転支援/自動運転車両を混在させ、ヒヤリハット発生の確率を指標として本制御システムの効果評価を行う。さらに、交通環境モデルと走行リスク予測アルゴリズムを合わせたバーチャル評価手法を提案する。
(2)フレームワークの構築
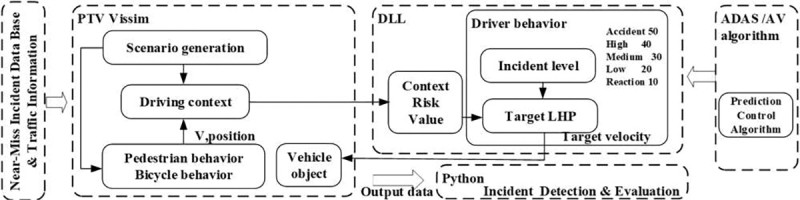
東京農工大学が収集するドライブレコーダに記録された約14万件のヒヤリハットデータの分析をもとに、図1に示すバーチャル検証・評価フレームワークを本学とEDI社が共同で構築した。本研究では、交通シミュレーションソフトウェアであるPTV Vissimに基づいてDLL(Dynamic Link Library)を使い、リスク指標をもつ新制御アルゴリズムの実装が特徴となる。
本研究では、潜在リスクが高い走行条件での支援システムの効果予測に注目する。多発している危険なシナリオとして分類した走行環境モデルを構築することで、先読み減速制御車両と本制御の無い運転支援/自動運転車両を混在させ、ヒヤリハット発生の確率を指標として本制御システムの効果評価を行う。さらに、交通環境モデルと走行リスク予測アルゴリズムを合わせたバーチャル評価手法を提案する。
(2)フレームワークの構築
東京農工大学が収集するドライブレコーダに記録された約14万件のヒヤリハットデータの分析をもとに、図1に示すバーチャル検証・評価フレームワークを本学とEDI社が共同で構築した。本研究では、交通シミュレーションソフトウェアであるPTV Vissimに基づいてDLL(Dynamic Link Library)を使い、リスク指標をもつ新制御アルゴリズムの実装が特徴となる。
■ 走行リスク指標の明確化
(1)先読み減速制御
走行交通環境の潜在リスクが高い場合,安全性確保の為、熟練ドライバの様に環境適用速度に下げる事で、安全性を高める研究が行われている。事前に減速する事で、万が一の際に対応可能な時間余裕を十分に確保する事が可能になる。従来の研究を踏まえ,走行中の交通環境要因(高い不確実性・複雑性)とドライバ的要因(ヒューマンエラー)に基づく。リスク予測アルゴリズム「先読み減速制御」を自車両に搭載しその効果も評価した。
(2)走行リスク指標の確立
走行道路環境のリスクとドライバの運転行動による2つのリスクがある。ヒヤリハットデータベースにおけるインシデントの分析により、走行道路環境パラメータを定量化した。それらのパラメータに応じるリスク指標はRisk Valueである。また、ヒヤリハット事象が起きる数秒前のドライバ行動に関わるリスク指標は、LHP(Long-term Hazard Potential)と呼ばれ、式(1)(略)のように表現される。
本研究では、ドライバ要因に対して車両速度の関係を検討しており、ヒヤリハットが発生する事を仮定した際、LHP指標値を通じて目標通過速度を算出する。また、走行道路環境に関わるRisk Value指標と合わせて、自車両の制御に反映した。
走行交通環境の潜在リスクが高い場合,安全性確保の為、熟練ドライバの様に環境適用速度に下げる事で、安全性を高める研究が行われている。事前に減速する事で、万が一の際に対応可能な時間余裕を十分に確保する事が可能になる。従来の研究を踏まえ,走行中の交通環境要因(高い不確実性・複雑性)とドライバ的要因(ヒューマンエラー)に基づく。リスク予測アルゴリズム「先読み減速制御」を自車両に搭載しその効果も評価した。
(2)走行リスク指標の確立
走行道路環境のリスクとドライバの運転行動による2つのリスクがある。ヒヤリハットデータベースにおけるインシデントの分析により、走行道路環境パラメータを定量化した。それらのパラメータに応じるリスク指標はRisk Valueである。また、ヒヤリハット事象が起きる数秒前のドライバ行動に関わるリスク指標は、LHP(Long-term Hazard Potential)と呼ばれ、式(1)(略)のように表現される。
本研究では、ドライバ要因に対して車両速度の関係を検討しており、ヒヤリハットが発生する事を仮定した際、LHP指標値を通じて目標通過速度を算出する。また、走行道路環境に関わるRisk Value指標と合わせて、自車両の制御に反映した。
■ 交通シナリオのモデル化
(1)ロードユーザ(歩行者と自転車)の行動モデル
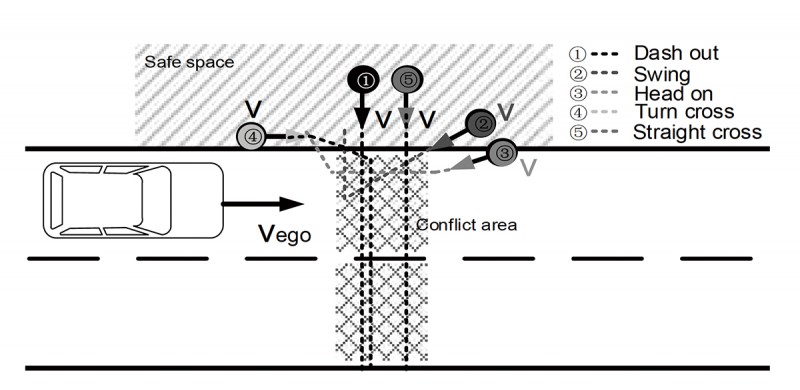
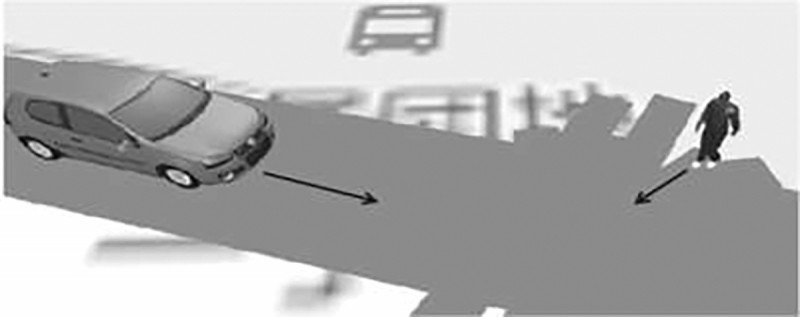
ヒヤリハットデータから道路を横断する歩行者シーン90件と移動中自転車シーン30件を抽出して飛び出し速度について主観的評価を行った。また、対象の平均移動速度を算出し、歩行者の飛び出し閾値を2m/s、自転車の閾値を3m/sに設定した。ラベル付けした約14万件のヒヤリハットデータの統計より、図2に示す5種類の歩行者と自転車の行動パターンを設定した。道路構造別、各行動別の歩行者と自転車の発生確率も考慮し、各シーンでの歩行者と自転車の行動をモデル化した。
ヒヤリハットデータから道路を横断する歩行者シーン90件と移動中自転車シーン30件を抽出して飛び出し速度について主観的評価を行った。また、対象の平均移動速度を算出し、歩行者の飛び出し閾値を2m/s、自転車の閾値を3m/sに設定した。ラベル付けした約14万件のヒヤリハットデータの統計より、図2に示す5種類の歩行者と自転車の行動パターンを設定した。道路構造別、各行動別の歩行者と自転車の発生確率も考慮し、各シーンでの歩行者と自転車の行動をモデル化した。
(2)周辺走行車両のドライバモデル
Vissimには、心理物理的なモデルに基づいた速度の違いと距離に応じて、加速あるいは減速しながら前方の車両に反応する車両追従モデルが組み込まれている。追従モデルはクルマの走行状態を、自由走行・追従・接近・緊急ブレーキ4つの状態に分類した。緊急ブレーキ作動条件を示す。
LHPモデルはDLLとして、Wiedmann74追従モデルと統合し、加速度と速度を変更することによって、「先読み減速」制御は実現される。これらの技術から他のロードユーザとの相互作用が定義され、状況によりヒヤリハットを発生させることができる。
(3)走行道路環境
大学周辺の直線・交差点・カーブを抽出し、オープン地図のデータを基に道路の構造をモデル化した。交通流量を確定する為に、日本交通管理技術協会が実測したデータを入手した。本研究の場合、渋滞でない流れる交通状況を想定し、1時間あたり100台と200台の条件を設定している。また、交通シナリオは歩行者及び自転車の行為と走行道路環境を合わせて6種類のシナリオに設定した。
Vissimには、心理物理的なモデルに基づいた速度の違いと距離に応じて、加速あるいは減速しながら前方の車両に反応する車両追従モデルが組み込まれている。追従モデルはクルマの走行状態を、自由走行・追従・接近・緊急ブレーキ4つの状態に分類した。緊急ブレーキ作動条件を示す。
LHPモデルはDLLとして、Wiedmann74追従モデルと統合し、加速度と速度を変更することによって、「先読み減速」制御は実現される。これらの技術から他のロードユーザとの相互作用が定義され、状況によりヒヤリハットを発生させることができる。
(3)走行道路環境
大学周辺の直線・交差点・カーブを抽出し、オープン地図のデータを基に道路の構造をモデル化した。交通流量を確定する為に、日本交通管理技術協会が実測したデータを入手した。本研究の場合、渋滞でない流れる交通状況を想定し、1時間あたり100台と200台の条件を設定している。また、交通シナリオは歩行者及び自転車の行為と走行道路環境を合わせて6種類のシナリオに設定した。
■ シミュレーション実験と実験結果
(1)実験条件
設定した6つの各シナリオでヒヤリハットレベルと交通量などパラメータ設定により8組シミュレーションを行った。
(2)シミュレーション初期設定の確認
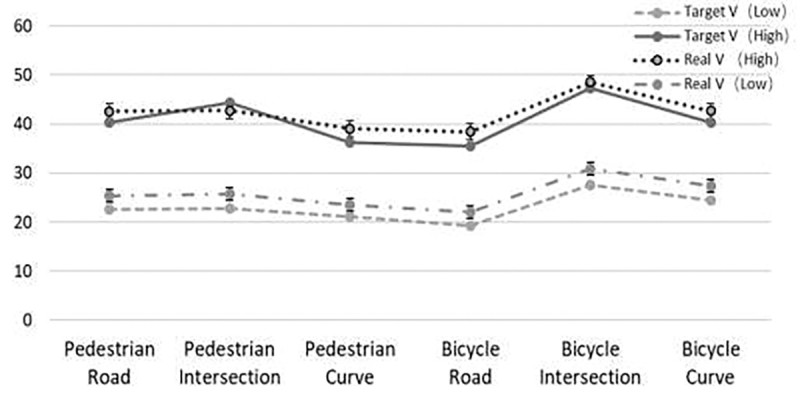
本研究では、初期設定確認にシミュレーション上の定点での交通量および平均速度を用い、全シナリオの再現性検査を実施した。(初期設定の再現性を判断する数値指標としてGEH値を使用した。)全シナリオにわたって初期設定の確認ができた。また、先読み減速制御は、交差点等の飛び出し場面毎の通過速度に反映され、制御アルゴリズムの再現性は図3より、各シナリオでLHPレベルの高低の2パターンによる目標通過速度とシミュレーションの通過速度を表す。十分な一致性が得られた為、以後の研究に適応できるものと判断した。
(3)ヒヤリハットの検出
SCT(Safety Cushion Time)は歩行者が飛び出すより以前に、歩行者が飛び出すことを仮定した際の安全マージン指標である。
設定した6つの各シナリオでヒヤリハットレベルと交通量などパラメータ設定により8組シミュレーションを行った。
(2)シミュレーション初期設定の確認
本研究では、初期設定確認にシミュレーション上の定点での交通量および平均速度を用い、全シナリオの再現性検査を実施した。(初期設定の再現性を判断する数値指標としてGEH値を使用した。)全シナリオにわたって初期設定の確認ができた。また、先読み減速制御は、交差点等の飛び出し場面毎の通過速度に反映され、制御アルゴリズムの再現性は図3より、各シナリオでLHPレベルの高低の2パターンによる目標通過速度とシミュレーションの通過速度を表す。十分な一致性が得られた為、以後の研究に適応できるものと判断した。
(3)ヒヤリハットの検出
SCT(Safety Cushion Time)は歩行者が飛び出すより以前に、歩行者が飛び出すことを仮定した際の安全マージン指標である。
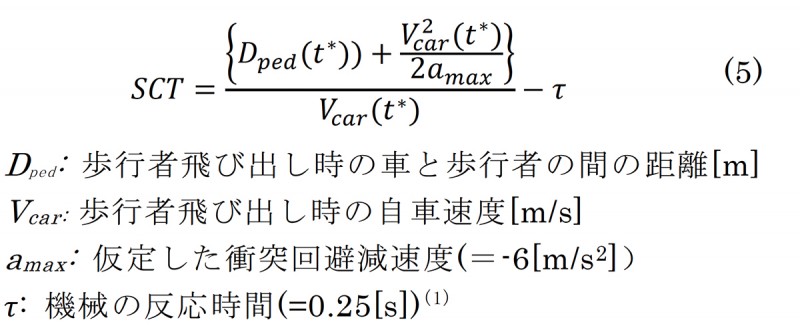
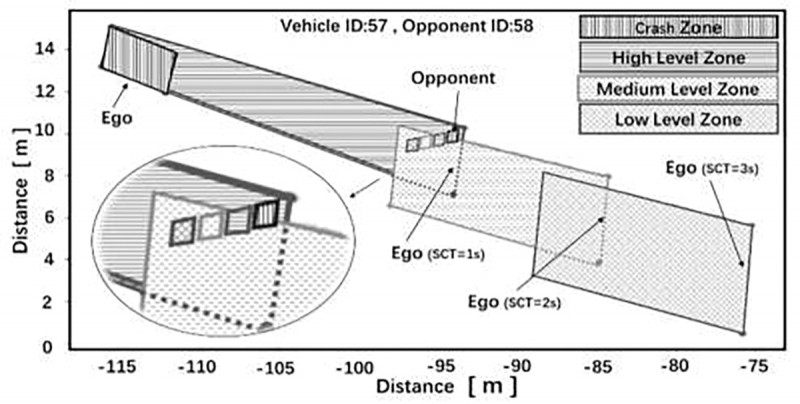
SCTは、ドライバが回避操作の実行のために許された余裕時間を意味することから、時間的切迫度を定量的に表現するヒヤリハットから事故までの4レベル(事故・高・中・低)に分類する検出ツールを開発した。シミュレーションのデータにおけるデータ整理・ヒヤリハットなどの算出とデータを可視化することができる。図4に示したのはインシデントが発生した歩行者―カーブシナリオである。図4(b)に示したのは図4(a)の条件でのゾーンである。クルマと歩行者における高レベルゾーンが重なる部分は、高レベルインシデントを検出していることを示している。
(4)実験結果
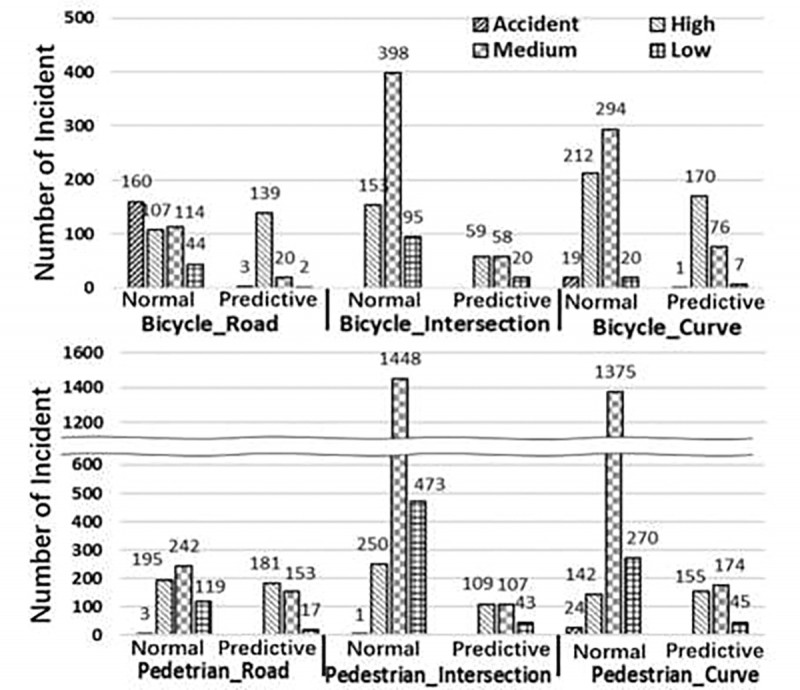
24時間シミュレーションでの時間的加速試験により、SCT検出アルゴリズムを用いて制御効果等の評価を行った。交差点等の飛び出し場面でのヒヤリハットは合計7,486件発生した。約10年間掛けて収集した東京農工大学のヒヤリハットデータの飛び出しヒヤリハットは約3,500件あるが、本統計的シミュレーションでは、約2倍のサンプルを1152時間で発生させることができ、加速試験としても有効と言える。また、先読み減速制御の効果を見ると、ヒヤリハットが約1/4に減少している。更に事故総数で1/50となり(歩行者は 0、自転車の衝突4件)、大きな低減効果が確認でき、その有効性を定量的に示せた。加えて、図6の様に、各飛び出し各場面の各要因の寄与度が分かるミクロな視点で、重要な要因を分析できる点も大きな成果である。
24時間シミュレーションでの時間的加速試験により、SCT検出アルゴリズムを用いて制御効果等の評価を行った。交差点等の飛び出し場面でのヒヤリハットは合計7,486件発生した。約10年間掛けて収集した東京農工大学のヒヤリハットデータの飛び出しヒヤリハットは約3,500件あるが、本統計的シミュレーションでは、約2倍のサンプルを1152時間で発生させることができ、加速試験としても有効と言える。また、先読み減速制御の効果を見ると、ヒヤリハットが約1/4に減少している。更に事故総数で1/50となり(歩行者は 0、自転車の衝突4件)、大きな低減効果が確認でき、その有効性を定量的に示せた。加えて、図6の様に、各飛び出し各場面の各要因の寄与度が分かるミクロな視点で、重要な要因を分析できる点も大きな成果である。
■ 結言
本研究は既存の交通シミュレーションVissimを基に、交通環境因子とドライバ因子のリスク指標を実装し、また確率的な要因も加え、発生インシデントを予測するバーチャル評価手法を確立した。さらに、交通環境とロードユーザの行動モデルも再現することで、よりリアルで信憑性の高いものとして検証された。これを用いた「先読み減速制御」効果評価では、リスクを予測することでヒヤリハットが大幅に低減することを定量的に示すことができた。今後、自動運転/運転支援システムの安全性評価にも展開し安全技術の進化に貢献していく。
-
 指導教員からのコメント
自動運転・運転支援研究室教授 井上 秀雄
指導教員からのコメント
自動運転・運転支援研究室教授 井上 秀雄
- 自動運転の安全性保証の律速には次の3点があります。①見えている状況から見えないものを予測する「かもしれない運転」の様なリスク予測知能の不足。②自然界相手の走行環境をセンシングするセンサ技術の物理的限界が不明瞭のため、どれだけやれば安全性保障したかがいえない(How safe is safe enough?)。③実車走行の実績評価に頼ざるを得ず、莫大なコスト(人・物・金)がかかる(仮想シミュレーションの必要性)。本研究は①と③に関係し、ヒヤリハットデータから、走行環境リスク指標、ドライバ運転行動リスク指標を定量化し、交通流シミュレーションに組込み、確率的にヒヤリハットレベル(事故も含む)を予測する仮想シミュレーションを可能にした画期的なものです。自動運転の安全性保証の方向性に一石を投じた貴重な研究です。
-
 修士研究学生からの一言
張 海鵬
修士研究学生からの一言
張 海鵬
- クルマの知能化に関わる研究活動では、複数分野の知識が必要だと実感しました。自動車工学だけではなく、プログラミング、アルゴリズムなどの知識を身につけて、教授のあたたかい指導をいただいて研究ができた事は良かったと思っています。また、本研究は共同研究だったため、大手企業、海外TOPレベルの大学との接点があり、視野を広げられ、受け止め方や話し方などについても勉強になりました。これから仕事の上で発揮できる貴重な経験だと思っています。
- 創造工学部自動車システム開発工学科(大学サイト )
- 教員紹介ページ(大学サイト )
- 研究室ナビ(大学サイト)
