卒業研究のご紹介
2021年版
機械・自動車・ロボット系所属学生
共同不規則な動きをするルアーの開発
栁 辰寛(代表者)栃木県
工学部機械工学科機械工学コース
2021年3月卒業
2021年3月卒業
栃木県立茂木高等学校出身
三武 卓功神奈川県
工学部機械工学科機械工学コース
2021年3月卒業
2021年3月卒業
神奈川県立秦野総合高等学校出身
研究の目的
ブラックバスやシーバスをターゲットとして、近年様々なルアーが開発されています。
本研究では、不規則に上下左右に揺れながら進行するルアーの開発を行いました。これを実現するため、流体素子の流れの切換を応用しました。ルアー前面から流入する2本の流路を体内に設けて、一つは左右に対称に分岐させ、もう一つは上下に分岐させました。それぞれ左右、上下どちらの出口から流出するかは、外乱によって不規則に切り替わります。これによってルアーは左右上下に大きく振れる軌跡をとりながら進行します。これらによってルアーは大魚から逃げまどう小魚のような挙動をすることになります。このルアーの4倍のモデルを川の淀みで投げ、その挙動を調べました。ドローンによる空撮結果を画像解析し、目的が達成されているかを調べ、山中湖や相模湖でブラックバスがこのルアーに興味を示すかどうかについても調査しました。
本研究では、不規則に上下左右に揺れながら進行するルアーの開発を行いました。これを実現するため、流体素子の流れの切換を応用しました。ルアー前面から流入する2本の流路を体内に設けて、一つは左右に対称に分岐させ、もう一つは上下に分岐させました。それぞれ左右、上下どちらの出口から流出するかは、外乱によって不規則に切り替わります。これによってルアーは左右上下に大きく振れる軌跡をとりながら進行します。これらによってルアーは大魚から逃げまどう小魚のような挙動をすることになります。このルアーの4倍のモデルを川の淀みで投げ、その挙動を調べました。ドローンによる空撮結果を画像解析し、目的が達成されているかを調べ、山中湖や相模湖でブラックバスがこのルアーに興味を示すかどうかについても調査しました。
研究内容や成果等
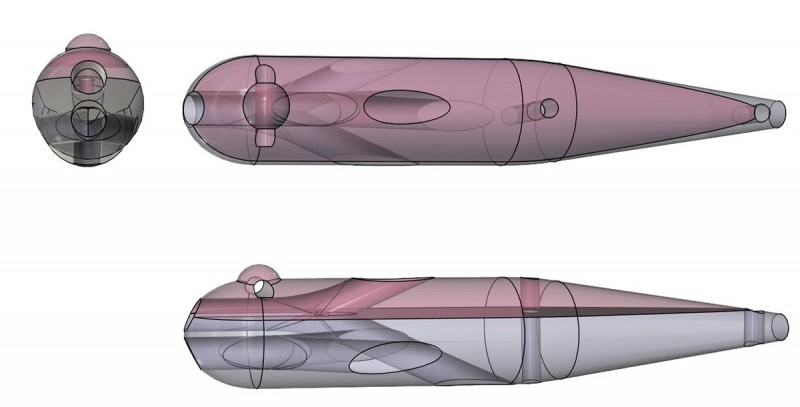
■ 3Dプリンターによるルアーの作成
図1にルアー形状を示す。上下に2つの口を設け、一つの口は左右対称に分岐する流路、もう一つの口は上下対称に分岐する流路につながっている。このルアーを上下に分割し、下部を高密度に、上部を低密度に、BOISUNS社製3DプリンターLK1 Plusで加工した後に接着した。これによって、ルアーが水中でかろうじて浮く程度に平均密度を調整し、重心を下方に設けることができる。材料はPLAを使用した。
実際のルアーは体長75mm、質量8gであるが、その4倍の体長300mm、質量500gのルアーも作成した。
実際のルアーは体長75mm、質量8gであるが、その4倍の体長300mm、質量500gのルアーも作成した。
■ ドローンによる空撮
4倍モデルを川の淀みで投げて、一定速度でリールを巻くときに、ルアーがどのような挙動をしながら進行するかを、真上からドローンで空撮した。ドローンはルアーの画像を捉えながら、直線上を移動する。図2、図3はその動画から切り出した静止画である。
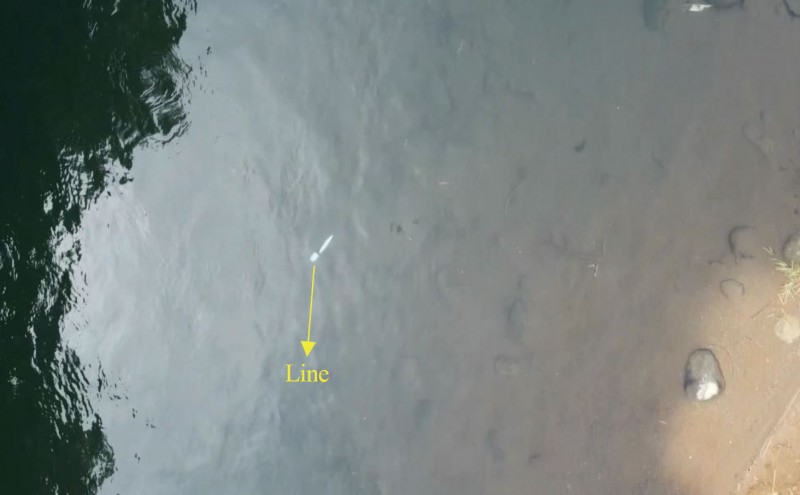

動画の1コマ1コマのルアーの先端と後端、それと特徴的な地形の1点(基準点)の座標を画像解析により取得した。基準点に対するルアー先端、後端の座標を算出することにより、ルアーの位置とルアーの向きを知ることができる。
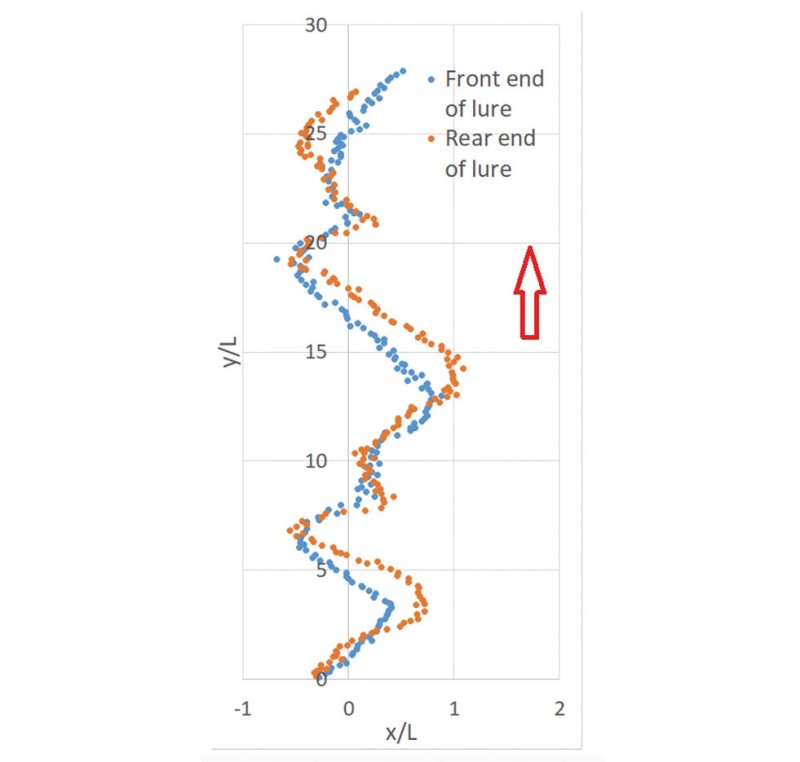
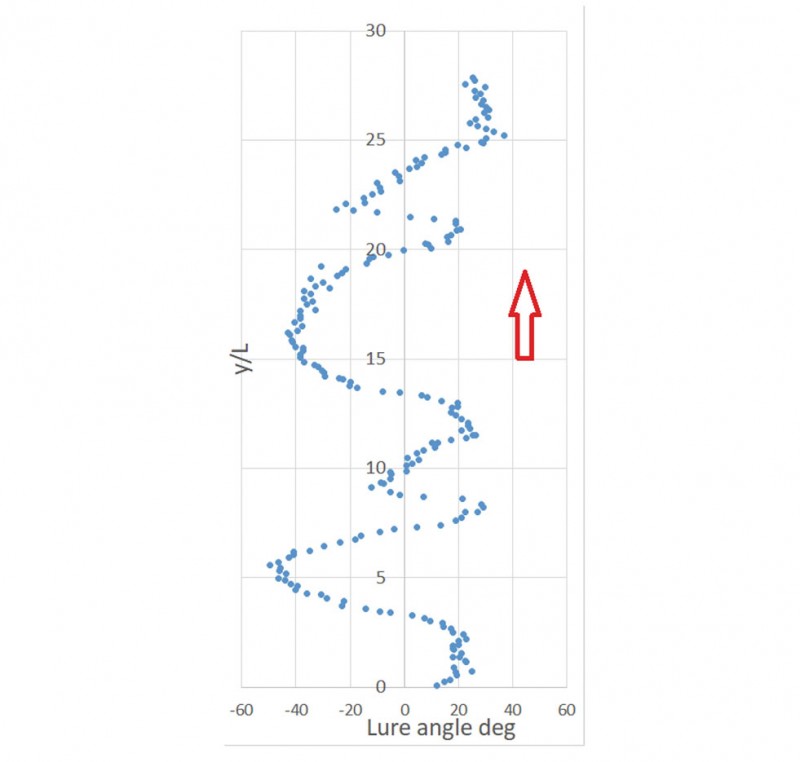
図4は縦軸にルアーの進行方向の座標を、横軸にそれと直交する座標をとった。ルアーの体長L(300mm)で無次元化してある。図5の縦軸は図4と同じで、横軸にルアーの進行方向に対する角度をとった。これらの図から、ルアーが不規則に横方向に進路を変えながら進行することがわかる。
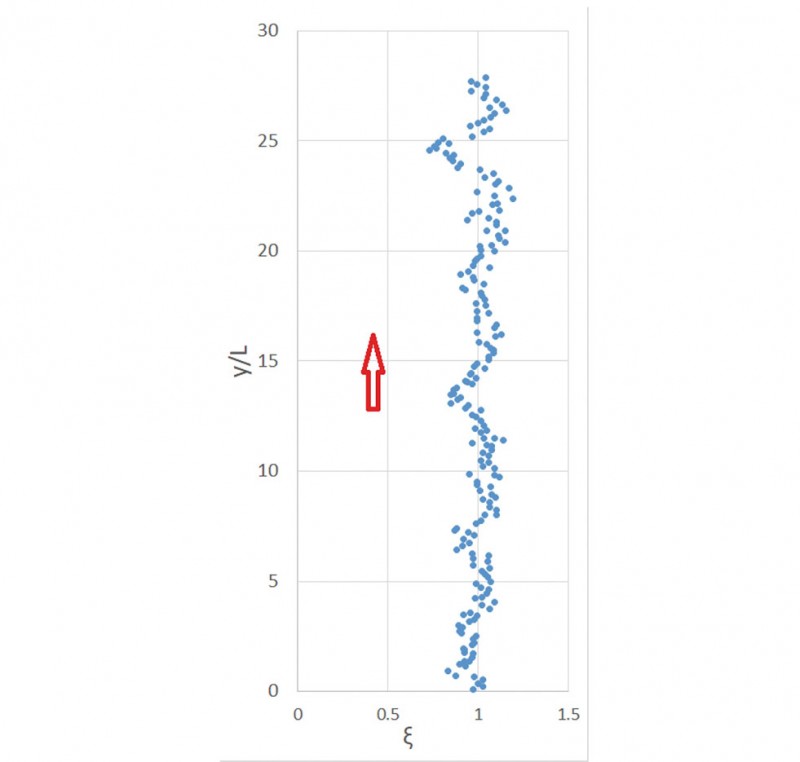
図6は、縦軸は図4と同じで、観察されたルアーの長さをその平均値で除した値ξを横軸にとってその変化を調べたもので、水深方向でも角度の不規則な変化が得られていることがわかる。
図4は縦軸にルアーの進行方向の座標を、横軸にそれと直交する座標をとった。ルアーの体長L(300mm)で無次元化してある。図5の縦軸は図4と同じで、横軸にルアーの進行方向に対する角度をとった。これらの図から、ルアーが不規則に横方向に進路を変えながら進行することがわかる。
図6は、縦軸は図4と同じで、観察されたルアーの長さをその平均値で除した値ξを横軸にとってその変化を調べたもので、水深方向でも角度の不規則な変化が得られていることがわかる。
■ 試釣(図7、8省略)
開発ルアーが魚にアピールできるかを調べるため、山中湖ならびに相模湖で試釣を行った。その結果、それぞれの湖で、体長40cm弱のブラックバスを釣り上げることができた。
■ 結言
流体素子の原理を利用し、ランダムな挙動を持つルアーを3Dプリンターで作成した。その4倍モデルを川の淀みで投げて、その動きをドローンで空撮した。画像解析をして、ルアーの挙動を調べた結果、左右上下に大きく不規則に揺れながら、進行することが確かめられた。
山中湖ならびに相模湖で試し釣りをした結果、それぞれの湖で40cm弱のブラックバスを開発ルアーで釣り上げることができた。
山中湖ならびに相模湖で試し釣りをした結果、それぞれの湖で40cm弱のブラックバスを開発ルアーで釣り上げることができた。
-
 卒業研究学生からの一言
栁 辰寛
卒業研究学生からの一言
栁 辰寛
- 本研究では、実際に舟に乗って、湖で釣りをする貴重な体験と共に釣りや流体力学の知識を身につけられました。設計したルアーを3Dプリンターで一つ作成するのに6時間かかりました。ブラックバスは湖の端にいることが多く、ギリギリを狙う必要があったため、釣り初心者の私には難しく、ルアーを何個も失くしてしまい大変でした。また、学外での活動が多く、他の人とのコミュニケーション能力を向上させることができました。さらに、早朝に出発し、ほぼ終日舟の上でルアーを投げ続けたため、精神力と忍耐力もつきました。
- 工学部機械工学科(大学サイト )
- 教員紹介ページ(大学サイト )
- 研究室ナビ(大学サイト)
