卒業研究のご紹介
2021年版
機械・自動車・ロボット系所属学生
ステアリングジオメトリーが走行抵抗と操舵力に及ぼす影響
藤原 誼紀岩手県
大学院機械システム工学専攻 博士前期課程1年
(創造工学部自動車システム開発工学科次世代自動車開発特別専攻2021年3月卒業)
(創造工学部自動車システム開発工学科次世代自動車開発特別専攻2021年3月卒業)
岩手県 協和学院水沢第一高等学校出身
研究の目的
市販されている多くの車は、極低速時でタイヤに負荷が掛からないよう、内輪は大きく切り、外輪は小さく切る“アッカーマンステアリングジオメトリー”を機構的に実現したものが主流である。一方で、中高速時の横加速度が大きくなる旋回においては、タイヤの荷重依存性によって外輪を大きく切った方が、タイヤを効率的に利用することができる。このことから、本研究室ではすべての速度域において効率的な前輪アクティブステアの制御則の検討を行い、シミュレーション・実車実験により旋回性能向上に有効であることを確認してきた。
よって、本研究では市販車のアッカーマン率を調査し設計の傾向を探ることと、幾何学的関係によって決まるステアリングジオメトリーが、ドライバー(ユーザー)にどのような影響を与えるかを走行抵抗と操舵力を計測し、検討することを目的とした。
よって、本研究では市販車のアッカーマン率を調査し設計の傾向を探ることと、幾何学的関係によって決まるステアリングジオメトリーが、ドライバー(ユーザー)にどのような影響を与えるかを走行抵抗と操舵力を計測し、検討することを目的とした。
研究内容や成果等
■ ステアリングジオメトリー
(1)幾何学的関係
ステアリングジオメトリーの代表的なものとして、極低速の旋回においてタイヤに横すべりが生じないように前左右輪を操舵するアッカーマンステアリングジオメトリーと、左右輪を等しく操舵するパラレルステアリングジオメトリーがある。
アッカーマンステアリングジオメトリーを表す代表的な式を以下に示す。
ステアリングジオメトリーの代表的なものとして、極低速の旋回においてタイヤに横すべりが生じないように前左右輪を操舵するアッカーマンステアリングジオメトリーと、左右輪を等しく操舵するパラレルステアリングジオメトリーがある。
アッカーマンステアリングジオメトリーを表す代表的な式を以下に示す。

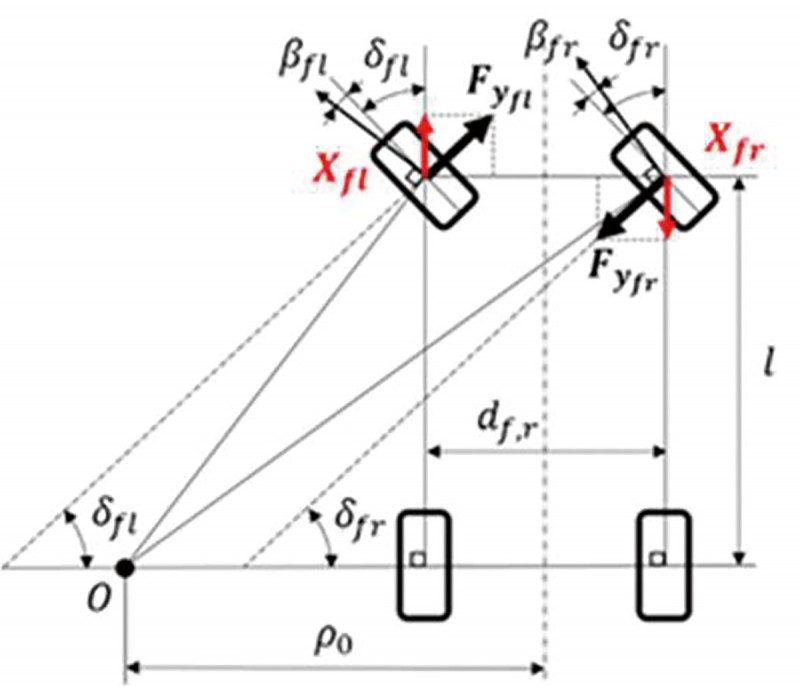
極低速旋回時におけるアッカーマンステアリングジオメトリーの概略をFig.1に、パラレルステアリングジオメトリーの概略をFig.2に示す。
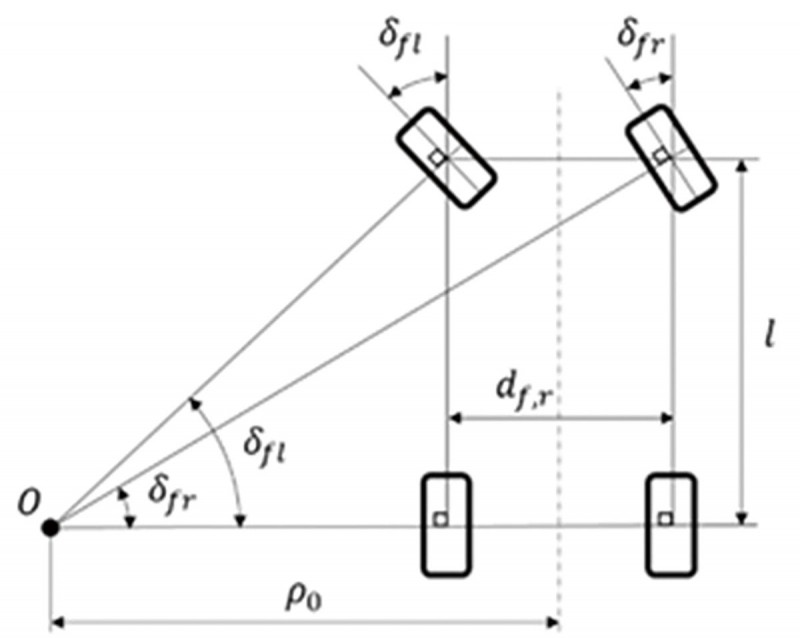
式(1)で計算されるアッカーマンステアリングジオメトリーの理論上の内外輪の切れ角の差と、計測によって得られた内外輪の切れ角の差の比をアッカーマン率とする。以降、この値を用いてステアリングジオメトリーの傾向を表すのに使用する。例えば、アッカーマンステアリングジオメトリーはアッカーマン率100%、パラレルステアリングジオメトリーは0%となる。
(2)走行抵抗への影響
図1のようにアッカーマンステアリングジオメトリーでは各タイヤの旋回中心が1点で交わるように前左右輪を操舵することで内外輪ともに横すべり角が生じない、つまりタイヤが余計な力を発生することがないため走行抵抗が小さく滑らかに旋回できる。
一方、図2のようにパラレルステアリングジオメトリーでは、左右輪の旋回中心が異なるため、旋回時に横すべり角βfl、βfr(<0)が生じる。それにより旋回時に内外輪逆向きの横力Fyfl(<0)、Fyfrが発生する。この横力のうち車体に対する前後方向の成分としてXfl、Xfr(<0)が働き、車体が旋回しようとする向きとは逆向きのモーメントを発生させるとともに、極低速旋回時には抵抗として作用することになる。
(3)操舵力への影響
本節では、キャスタートレール変化によるキングピン軸まわりのモーメントに着目し、操舵力への影響への検討を行う。キングピンジオメトリーの(a)側面図と(b)正面図をFig.3に示す。
(2)走行抵抗への影響
図1のようにアッカーマンステアリングジオメトリーでは各タイヤの旋回中心が1点で交わるように前左右輪を操舵することで内外輪ともに横すべり角が生じない、つまりタイヤが余計な力を発生することがないため走行抵抗が小さく滑らかに旋回できる。
一方、図2のようにパラレルステアリングジオメトリーでは、左右輪の旋回中心が異なるため、旋回時に横すべり角βfl、βfr(<0)が生じる。それにより旋回時に内外輪逆向きの横力Fyfl(<0)、Fyfrが発生する。この横力のうち車体に対する前後方向の成分としてXfl、Xfr(<0)が働き、車体が旋回しようとする向きとは逆向きのモーメントを発生させるとともに、極低速旋回時には抵抗として作用することになる。
(3)操舵力への影響
本節では、キャスタートレール変化によるキングピン軸まわりのモーメントに着目し、操舵力への影響への検討を行う。キングピンジオメトリーの(a)側面図と(b)正面図をFig.3に示す。
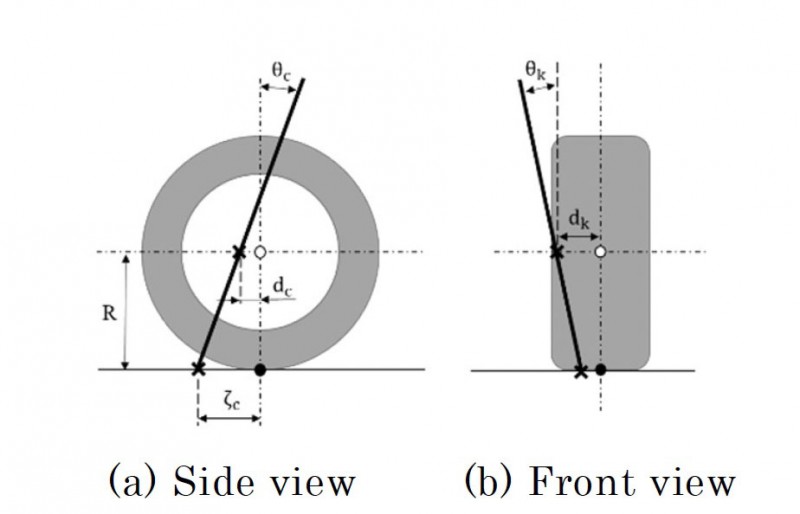
キャスタートレールζcは、キャスター角θcとキングピン傾角θkを微小とすると、ハンドル角をギア比で割ったδfを用いて、式(2)のように表せる。
ζc ≈ dc+ Rθccos δf + Rθk sin δf (2)
式(2)のδfに内輪を正、外輪を負として代入すると、第3項により内輪のキャスタートレールは増加し、外輪は減少するという関係がある。これと(2)節で述べた内外輪逆向きの横力によって、パラレルステアリングジオメトリーではハンドルを戻そうとするモーメント(横力×ζc)が減少し、最終的にはハンドルを切り増す方向にモーメントが発生する。また、大舵角であるほどその傾向が強くなる。
ζc ≈ dc+ Rθccos δf + Rθk sin δf (2)
式(2)のδfに内輪を正、外輪を負として代入すると、第3項により内輪のキャスタートレールは増加し、外輪は減少するという関係がある。これと(2)節で述べた内外輪逆向きの横力によって、パラレルステアリングジオメトリーではハンドルを戻そうとするモーメント(横力×ζc)が減少し、最終的にはハンドルを切り増す方向にモーメントが発生する。また、大舵角であるほどその傾向が強くなる。
■ 実車実験
『前輪アクティブ操舵機能付きハブベアリング(以下sHUBとする)』を搭載した車両に、繰り返し、同一操舵入力が可能なステアリングロボットとハンドル操舵角力計を搭載し、実験を行った。この車両のアッカーマン率は約60%である。この状態とsHUBによって車両のアッカーマン特性を相殺し、アッカーマン率0%の状態で比較を行った。
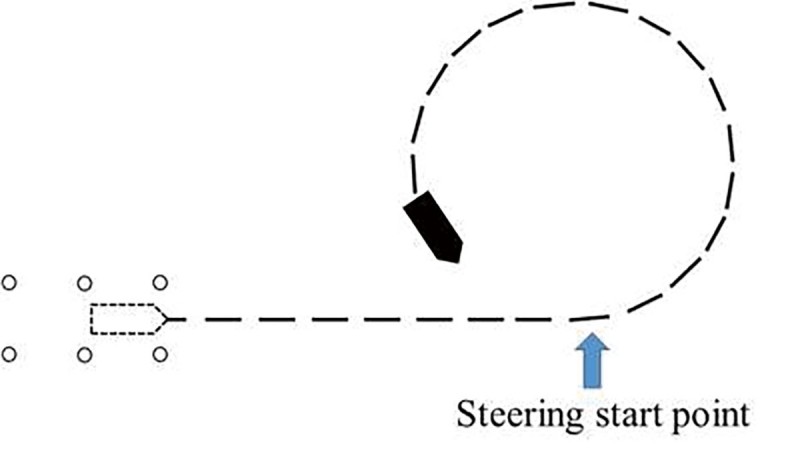
この車両を用いて走行抵抗、操舵力の測定のため惰行試験を行った。指定した車速でコースに進入した後、操舵開始と同時に駆動力がかからない状態で惰行し、完全停止までの車速と操舵角力を計測した。操舵はランプステップを入力した。Fig.4にコースレイアウトを示す。
この車両を用いて走行抵抗、操舵力の測定のため惰行試験を行った。指定した車速でコースに進入した後、操舵開始と同時に駆動力がかからない状態で惰行し、完全停止までの車速と操舵角力を計測した。操舵はランプステップを入力した。Fig.4にコースレイアウトを示す。
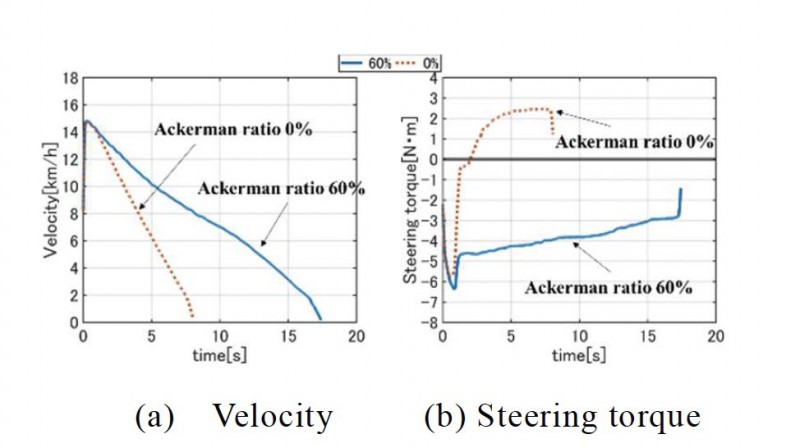
車速15km/hでコースに進入し、400degの操舵を入力した時の車速(a)と操舵角力(b)の変化を時系列でFig.5に示す。破線がアッカーマン率0%で、実線がアッカーマン率60%の結果である。操舵角力の結果は、舵角入力に対してハンドルを戻そうとする方向を負に、ハンドルを切り増す方向を正にとっている。
車速より計算した平均減速度はアッカーマン率0%で0.507m/s2、アッカーマン率60%で0.237m/s2となった。よって、アッカーマン率が下がると、内輪の前後力に比べ、外輪の前後力がより大きく変化することが確認された。また、アッカーマン率0%では、操舵角力が正に転じていることから、ハンドルをより切り増す方向に発生する結果となった。
車速より計算した平均減速度はアッカーマン率0%で0.507m/s2、アッカーマン率60%で0.237m/s2となった。よって、アッカーマン率が下がると、内輪の前後力に比べ、外輪の前後力がより大きく変化することが確認された。また、アッカーマン率0%では、操舵角力が正に転じていることから、ハンドルをより切り増す方向に発生する結果となった。
■ あとがき
実車実験によって、アッカーマン率が低くなると走行抵抗は増加し、操舵力はハンドルを戻そうとする力が減少し、最終的にはハンドルを切り増す方向に発生することを確認した。
今後はこれまで提案されてきた運動性能を向上させる制御則による走行抵抗と操舵力への影響を、定常域から過渡域まで調査を行う必要があると考える。
今後はこれまで提案されてきた運動性能を向上させる制御則による走行抵抗と操舵力への影響を、定常域から過渡域まで調査を行う必要があると考える。
-
 指導教員からのコメント
車両運動・制御研究室教授 山門 誠
指導教員からのコメント
車両運動・制御研究室教授 山門 誠
- 藤原誼紀君の研究は、日本の大学では本学にしかないステアリングロボットを用い、世界に一台のsHUB車両(ベースはトヨタ86)を題材として、企業との共同研究という立ち位置で実施されたものである。そこで得られた知見は対象企業のみではなく、大学院進学後の藤原君の研究に大きく役立っている。車両データ実測技術と並行して習得したフルビークルシミュレーション技術は、今後の彼のエンジニア人生における大きな武器になると思われる。今後の活躍を期待する。
-
 卒業研究学生からの一言
藤原 誼紀
卒業研究学生からの一言
藤原 誼紀
- 自動車を専門的に学べる学科なので講義はもちろんのことですが、課外活動や海外自動車研修、卒業研究に至るまで、この学科でしか経験できないことが多くありました。特に、学生フォーミュラでの活動を通し、先輩・先生方の協力のもと悪戦苦闘しながらも車両を走らせることができたことは、自分自身を成長させるとても良い経験になりました。また、学生も先生方にも車好きが多いので、大変充実した4年間を過ごすことができました。
- 大学院機械システム工学専攻 博士前期課程(大学サイト )
- 研究室ナビ(大学サイト)
