卒業研究のご紹介
2019年版
機械・自動車・ロボット系所属学生
競技用ソーラーカーにおける駆動力配分の検討
迎 裕一郎熊本県
創造工学部自動車システム開発工学科 2019年3月卒業
文徳高等学校出身
研究の目的
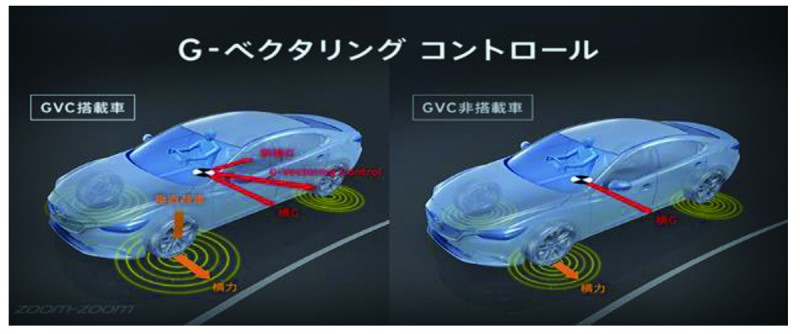
研究で使用される競技用のソーラーカーは、小さなエネルギーで効率よく走行させるため軽く、低転がりかつ低ドラッグの車両が製作されている。そのためドライバーの技量によって走行ペースやエネルギー消費に大きな差が生まれたり、横風等の外乱によって車両の安定性が失われ横転したりすることもある。本研究ではマツダ㈱のGベクタリングコントロールという技術を参考に操舵角を検出し、その変位の微分値がある一定のしきい値を超えるとモーターへの出力をカットするような制御を行っている。モーターの出力をカットすることで車両に減速度が生まれ操舵を行っている前輪のグリップを向上させることが出来るため、習熟度の低いドライバーが運転する場合や横風によって車両挙動を乱された場合でも車両側がドライバーの運転をサポートすることが可能である。
■ 研究概要
駆動力制御の検討において本研究では G-Vectoring Control(以下 GVC)を参考にした。KAIT Oneでは操舵角センサによりステアリングホイールの操舵角を計測し、SWAの変位の微分値がしきい値を超えるとモーターへの出力をカットするような減速のみの制御を行うこととした。
PWM duty ratio → 0%
= {𝜏′(Derivation Valueof SWA)× 100}
> X・・・ (1)
式(1)におけるXがしきい値となっており、この値を変化させることで操舵角の変化量に対してモーターの出力を制御する。
PWM duty ratio → 0%
= {𝜏′(Derivation Valueof SWA)× 100}
> X・・・ (1)
式(1)におけるXがしきい値となっており、この値を変化させることで操舵角の変化量に対してモーターの出力を制御する。
■ 実験
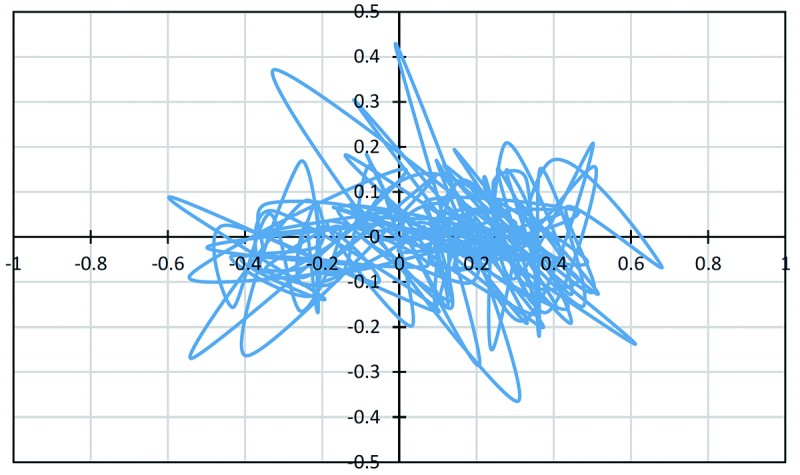
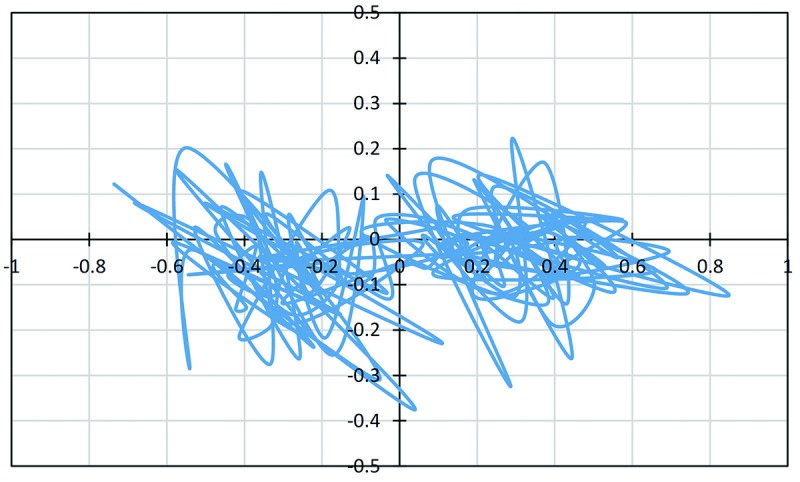
速度を時速 30km/h に保った状態で10m間隔にて設置した6本のパイロン間のスラロームや時速40km/h前後で陸上トラック曲走路部に反時計回りで進入し、制御ありと制御なしで各種センサから出力される数値にどのような差があるのかを調べた。
■ 結果と展望
横加速度に応じて減速度を付与するためのモーターの制御が少なからず出来たといえるが、ノイズによって車両の加速が遅くなり、マイコンの計測間隔が遅くなる(最初30ms程度だが計測時間が長くなると50ms以上かかる)などの問題もあるため随時改良を進めていきたい。
-
 指導教員からのコメント
准教授 藤澤 徹
指導教員からのコメント
准教授 藤澤 徹
- 省エネルギー性能を競う競技用ソーラーカーでは珍しい、車両運動・操縦安定性に関するテーマです。昨年度までの KAIT Spirit(3輪)から、新車として完成させた KAIT One(4輪)に対して、横加加速度に連係した車両前後加速度の制御を適用し、その効果を検証する狙いがありました。軽量化のため、後輪1輪のインホイールモータでどうやって車両のコーナリング性能を高めるか、ステアリングの操舵角や車両に加わるヨーレイトを鈴鹿サーキットにて計測するなど、ソーラーカープロジェクトと卒研の両方で頑張っていました。自動車部での経験を活かして、汚れを厭わず車両の整備や地味な作業に取り組む姿が大変印象的でした。
-
 卒業研究学生からの一言
迎 裕一郎
卒業研究学生からの一言
迎 裕一郎
- 卒業研究で初めてソーラーカーに触れ、最初は分からないことばかりだった。より軽くより効率を求める車両であるためカーボンモノコック構造の車体や太陽電池、バッテリなどソーラーカー特有の最先端素材を使用して製作する経験を学生として出来たことは魅力的だった。力学や電磁気学の知識を使って計算を行ったり、実際に車両に載せて動かしてみたりと講義で学んだことを活かす場面が多くあり自分の成長を実感できるよい機会であった。
- 創造工学部自動車システム開発工学科(大学サイト )
- 教員紹介ページ(大学サイト )
- 研究室ナビ(大学サイト)
