卒業研究のご紹介
2021年版
機械・自動車・ロボット系所属学生
自動制御へのカメラ認識による障害物回避制御の結合に関する研究
道田 峻佑兵庫県
大学院機械システム工学専攻 博士前期課程1年
(創造工学部自動車システム開発工学科2021年3月卒業)
(創造工学部自動車システム開発工学科2021年3月卒業)
兵庫県 須磨学園高等学校出身
研究の目的
近年、高齢者による交通事故報道などを契機に、高齢者の運転免許証自主返納を促す社会的風潮となっている。2019年に自主返納した人の数が、過去最多の60万1022人(前年比17万9832人増)となった。しかし、自動車が生活に欠かせない交通手段となっている地域では、返納が進まないなどの地域格差が問題となっている。そこで、自動運転などの運転支援技術の開発が急務になっている。
本研究では、NVIDIA Jetson AGX XavierとWebカメラを用いたカメラ認識による障害物回避制御とAutoware(自動運転用ソフトウェア)自動走行の結合を行った。また、カメラの認識精度や認識速度についての検証、自動運転技術の向上を目的とする。
本研究では、NVIDIA Jetson AGX XavierとWebカメラを用いたカメラ認識による障害物回避制御とAutoware(自動運転用ソフトウェア)自動走行の結合を行った。また、カメラの認識精度や認識速度についての検証、自動運転技術の向上を目的とする。
研究内容や成果等
■ NVIDIA Jetson AGX Xavier 開発者キット
NVIDIA Jetson AGX Xavier 開発者キットは、NVIDIA JetPack 4.4という名称で開発に必要なツールが一式提供されている。Ubuntu18.04LTSベースのOSに加え、DeepStream5.0、Cuda10.2、cuDNN8.0、TensorRT7.1.3、Gstreamer1.0、といったソフトウェアライブラリを利用できる。画像認識に使用する畳み込みニューラルネットワーク(CNN)モデルは、本研究では、JetPack4.4付属のResNet10を使用している。併せて、JetPack4.4付属の「人」「車」「自転車」「交通標識」学習済みモデルを使用した。
■ 実験車両とシステム構成
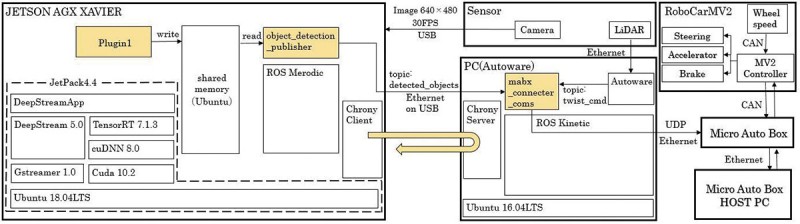
本システムは、AutowareとMicro Auto Box(dSPACE社)、Jetson AGX Xavier(NVIDIA 社)(以下、JETSON)、C922NPRO STREAM WEBCAM(Logicool社)、実験車両にRoboCar MV2(以下、COMS)を使用している。実験車両のシステム構成を図1に示す。COMSに搭載されているLiDARを使用し、Autowareで地図及び目標経路を生成することで経路追従自動運転を行う。車両制御はCOMSに搭載されている車輪速センサなどを使用し、Micro Auto Box経由で実行する。また、カメラからJETSON内のDeepStreamで認識を行う。対象物までの距離推定、対象物の寸法推定、認識結果を書き出すPlugin1によって共有メモリに書き込み、object_detection _publisherが読み込むことで、ROSノードを100Hz指定で送信する。mabx_connecter_comsがAutowareのTopicと認識結果のTopicを同期受信する。目標ヨーレート値を10Hz周期で送信し、経路追従及び回避制御を実行する。JETSON とPC(Autoware)は、ChronyでOSの時刻を同期する。
■ 認識対象物の距離及び寸法推定方法
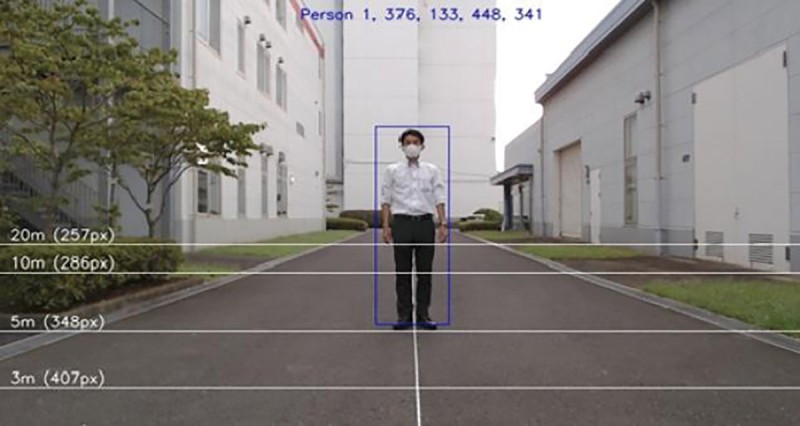
画像認識によって検出した対象物までの距離算出には、遠近法を利用している。距離算出のためのカメラキャリブレーションの様子を図2に示す。認識画面上部には、認識クラス、Bounding Box 左上座標 x、y、Bounding Box右下座標x,yが表示される。COMSにカメラを設置し、カメラから3m、5m、10m、20m離れた位置の対象物を、JETSONによって認識させる。各位置における検出結果のBounding Box右下座標点yを示したのが、図2の横線である。また、計測点以外の物標に関しては線形補間によって算出する。よって、検出結果のBounding Box右下座標点yより、対象までの距離を推定する。また、対象物の寸法推定には座標変換を用いる。カメラのワールド座標系における位置を決定し、対象物のスクリーン座標点を決定する。最後に、スクリーン座標点からワールド座標点に変換することで、対象物の寸法を推定する。
■ 障害物回避プログラム
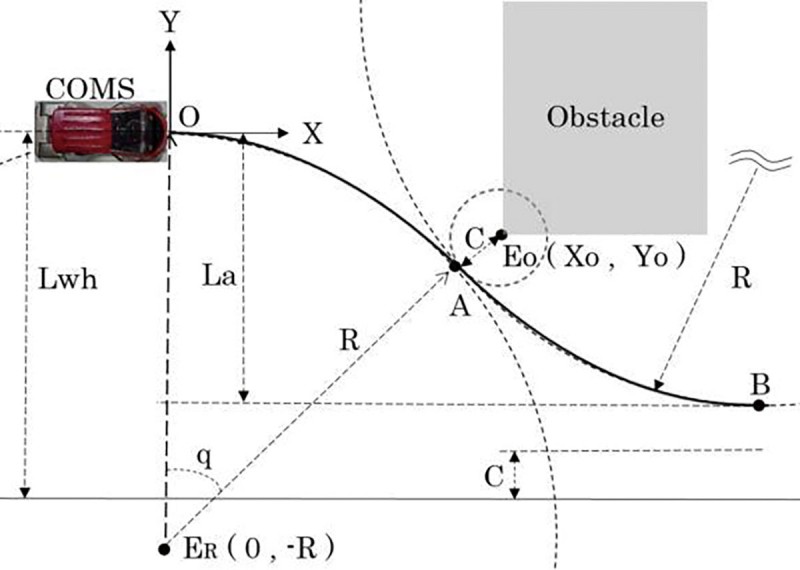
障害物回避プログラムはC言語を用いて開発し、障害物の座標点より目標回避経路を描き、目標ヨーレート値を算出する。予測回避経路の一例を図3に示す。障害物右端から車幅の半分を考慮した半径Cの円Eoを描き、カメラ位置Oでの接点がCOMS進行方向と平行で、円Eoと外接する円ERを描く。半径Rは最大となるようにする。円Eoと円ERの接点を切り替え点Aとし、経路OAに対して逆旋回となる半径Rの円を描く。OA=ABとなる点を回避終了点Bとする。経過時間より自己位置を推定し、終了点を決定する。Lwhは道路幅、Laは回避に要する横変位である。式(1)を満たすとき、操舵回避を実施する。このプログラムは、図1内で示したmabx_connecter_comsに追加し、Autowareからの目標ヨーレート値をMicro Auto Boxに送信する仕組みを活用した。
Lwh ≥ La+C (1)
Lwh ≥ La+C (1)
■ 実験概要
Autowareでの自動運転中にJETSONのカメラ認識による障害物回避実験を行う。安全面を考慮し、障害物は駐車車両とした。アクセル、ブレーキ、ステアリングを自動制御して約3km/hで定速走行し、COMS前方に搭載したWebカメラから駐車車両までの距離が5m以下になると障害物回避動作を開始する。
■ 実験結果及び考察
JETSONのカメラ認識精度について、障害物から約5m地点での認識結果を図4に示す。図中、depthが対象物までの距離、widthが対象物の幅である。対象物までの距離は4.9661mと推定されていて、回避動作にはほとんど影響を与えない誤差となった。対象物の幅の推定値は1.55024mとなり、実寸値の約1.59mとの誤差約0.04mと、ほぼ誤差なく推定できた。しかし、全幅1.745mとの誤差は約0.19mとなった。この誤差の要因として、対象物の車両が、曲線的な形状だったことが挙げられる。また、認識速度は平均値30FPSであり、回避動作を問題なく行える認識速度であった。
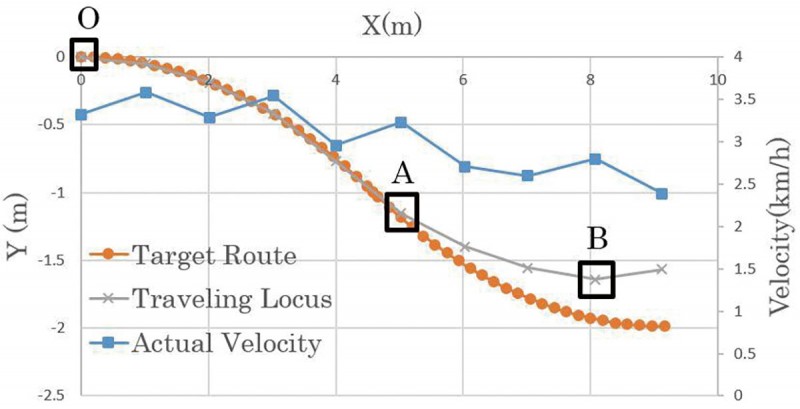
障害物回避実験の走行軌跡と速度の記録を図5に示す。回避開始点Oから切り替え点Aまでは、目標経路から大きく逸脱することなく走行できた。しかし、AB区間は目標経路と走行軌跡の逸脱幅が約0.3mとなった。要因としてAB区間では指令速度3km/hを下回ったためと推測する。短時間の間にステアリングを2度大きく切ったことによる失速が生じた。障害物回避プログラムは指令速度から回避終了時間を算出しているため、指令速度と実際の速度との差異が目標経路からの逸脱につながったと推察される。よって、プログラムに自己位置をフィードバックすることで回避動作の精度を向上できると推察する。
障害物回避実験の走行軌跡と速度の記録を図5に示す。回避開始点Oから切り替え点Aまでは、目標経路から大きく逸脱することなく走行できた。しかし、AB区間は目標経路と走行軌跡の逸脱幅が約0.3mとなった。要因としてAB区間では指令速度3km/hを下回ったためと推測する。短時間の間にステアリングを2度大きく切ったことによる失速が生じた。障害物回避プログラムは指令速度から回避終了時間を算出しているため、指令速度と実際の速度との差異が目標経路からの逸脱につながったと推察される。よって、プログラムに自己位置をフィードバックすることで回避動作の精度を向上できると推察する。

■ 結言
本研究では、NVIDIA Jetson AGX XavierとWebカメラからの画像情報で物体の寸法や位置を推定可能にし、カメラ認識による回避制御を開発した。この障害物回避制御を Autowareの経路追従自動運転制御に結合実装した結果、障害物回避が可能であることが実験で検証できた。
今後、車速制御精度を向上させ、坂道走行時や、車両のピッチが変動した場合における対象物までの推定距離補正等の認識精度の向上や、回避動作中の自己位置推定についての検討も必要である。
今後、車速制御精度を向上させ、坂道走行時や、車両のピッチが変動した場合における対象物までの推定距離補正等の認識精度の向上や、回避動作中の自己位置推定についての検討も必要である。
-
 指導教員からのコメント
自動運転・運転支援研究室教授 井上 秀雄
指導教員からのコメント
自動運転・運転支援研究室教授 井上 秀雄
- 道田君の研究は、これまで積み重ねてきた実験車Coms車両や自動運転の開発ツールを理解し、自力で障害物の自動回避制御を達成することを目的としました。障害物認識にはカメラの学習認識にはNVIDIA Jetson AGX Xavier,目経路追従自動運転には、Lidar, Autowareで地図生成→目標経路生成などそれぞれを一から習得し、試行錯誤を繰り返しながら障害物回避制御を達成できました。彼は大学院に進み、本研究を更に発展させ複数歩行者を避けながら校内を自動走行する制御に取組んでいます。事実やデータをよく見て課題と原因を解析していく問題解決の経験が今後も活きることでしょう。更なる研究の進化・深化に期待しています。
-
 卒業研究学生からの一言
道田 峻佑
卒業研究学生からの一言
道田 峻佑
- 私は、自動車について学びたい、実験や研究をしたいと思い入学しました。自動車開発の基礎について学べる授業や実習などがあり、大変充実した学生生活でした。研究活動では、企業でも使用される装置・ソフトウェアなどを大学内で使用できる環境が整っていたため、様々なスキルを身に着けることができたと思います。また、実車での研究に対して主体的に取り組んだことで、自ら考え行動する力を高めることができ、多くの失敗を経験したことで問題解決能力を鍛えることができたと思っています。
- 大学院機械システム工学専攻 博士前期課程(大学サイト )
- 研究室ナビ(大学サイト)
