卒業研究のご紹介
2020年版
機械・自動車・ロボット系所属学生
反射神経を備えたぶつからないモビリティの研究
近江 洋樹岩手県
創造工学部自動車システム開発工学科 2020年3月卒業
盛岡大学附属高等学校出身
研究の目的
近年、日本では高齢者ドライバーによる死亡事故増加が問題となっている。これに対して自動運転は交通諸問題を全て解決することが可能である。しかし、自動運転の普及には社会における絶対的信頼が必要であり、そのためには衝突しないことが優先課題である。従来、課題に対して障害物の配置に応じて経路を計画する方法が用いられてきた。しかし、この方法は障害物が移動した場合など、当初の経路とは異なる状況では衝突してしまう可能性がある。そこで本研究では計画的ではなく、反射的行動に類似した回避行動を実現することで、絶対に衝突しないモビリティを目指して研究を行った。
研究内容や成果等
■ 実験機器
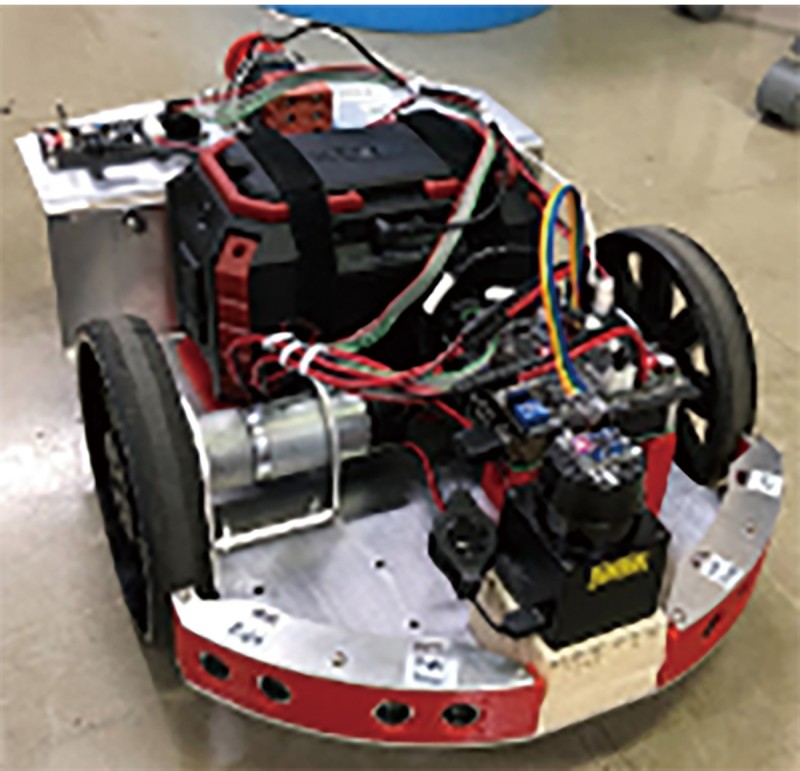
実験には2種類の小型・中型二輪ロボットを使用した。小型ロボットはRaspberry Pi Mouse V2(以下、Mouse)を、中型ロボットはRaspberry Pi CAT(以下、CAT)を使用した(Fig.1、Fig.2)。
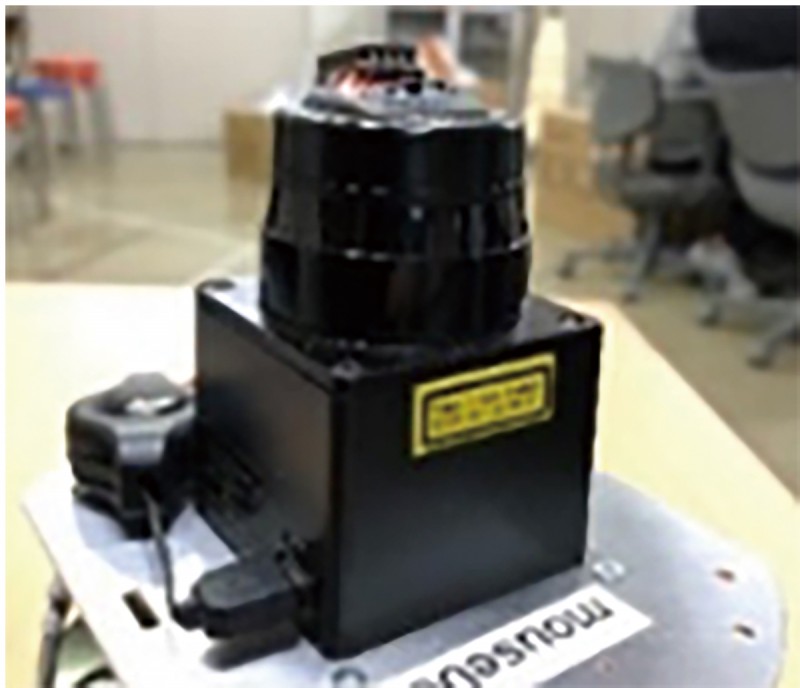
また、これらの車両に障害物認識のため全方位レーザーセンサ(Laser lmage Detection and Ranging:LiDAR)LiDAR(Fig.3)を搭載した。ベースとなる回避プログラムはROSにて作成する。この回避プログラムをMouseに実装する。
また、これらの車両に障害物認識のため全方位レーザーセンサ(Laser lmage Detection and Ranging:LiDAR)LiDAR(Fig.3)を搭載した。ベースとなる回避プログラムはROSにて作成する。この回避プログラムをMouseに実装する。

■ 実験結果
本研究では基本回避実験、自由走行実験、歩行者回避実験の三つの評価実験を行い、回避性能を向上させた。
(1)基本回避実験(Fig.4)
(1)基本回避実験(Fig.4)
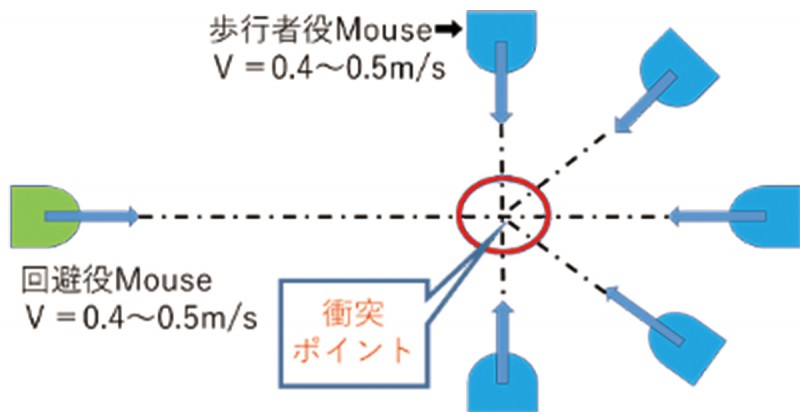
本実験は直進する回避役Mouseが、前方、左右斜め、横方向から対面走行する歩行者役Mouseを回避できるかを評価する実験である。なお、2台の速度は0.4〜0.5m/sの間で組み合わせて走行させた。実験では3種類の回避プログラムを作成した。1つ目はLiDARの照射するレーザー点群の中から特定の何点かで障害物を検知して回避するポイント検知法、2つ目はLiDARが照射する点群をエリアごとに振り分けて検知・回避を行うエリア検知法、3つ目は検知エリアを3エリアから5エリアに増やし、障害物回避を柔軟化したエリア細分化検知法(Fig.5)である。
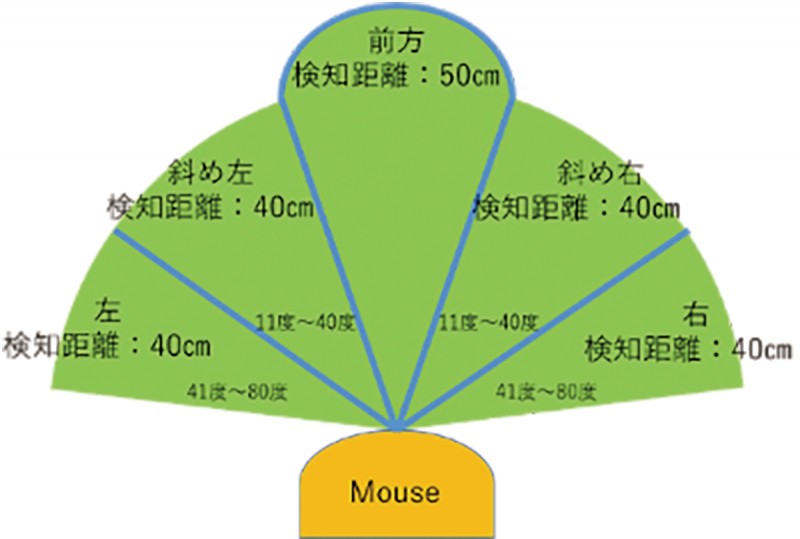
最も良好な結果を示したエリア細分化検知法では、すべての走行において回避可能であった(Table.1/略)。
エリア細分化検知法では障害物の前方検知距離を50㎝、その他のエリアにおける検知距離は40㎝とした。
(2)自由走行実験(Fig.6)
エリア細分化検知法では障害物の前方検知距離を50㎝、その他のエリアにおける検知距離は40㎝とした。
(2)自由走行実験(Fig.6)
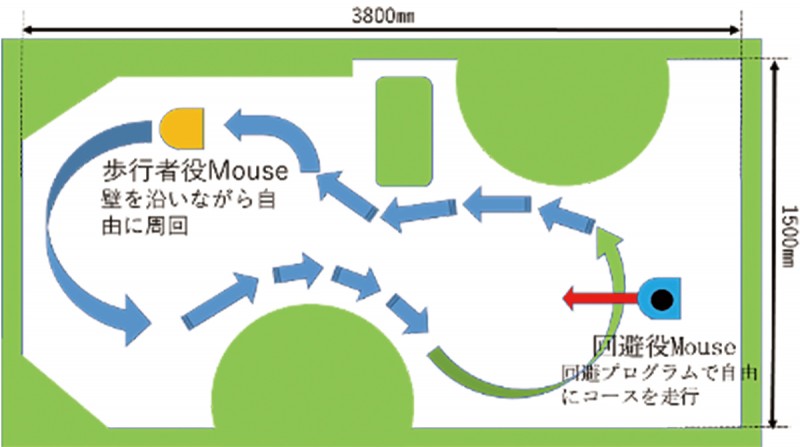
この実験はFig.6のような専用コースを作成し、回避役と歩行者役Mouseを速度0.5m/sで自由に走行させて回避役Mouseが歩行者役を回避できるのかを評価したものである。回避プログラムはエリア細分化検知法を使用した。
実験の結果、回避役は多くの場合、歩行者役を回避することができた。但し以下のような衝突案件が起きた。
1) 歩行者役Mouseを回避するも、直後に壁を避けきれず衝突
2) 壁を回避して直後の出会いがしらで避けきれず、歩行者役Mouseに衝突
上記の衝突案件から前方検知距離を変更し、障害物の早期検知を可能にした(Table.2/略)。検知距離は40〜50㎝までは回避が可能であるが、60㎝以上では障害物検知が過敏すぎ、コース全体の走行はできなかった。なお、前方検知距離以外の検知距離は全て40㎝のままで行った。
(3)歩行者回避実験
本実験は実験(1)にて高性能であった回避プログラムをMouseからCATに実装した。実装後、研究室裏の駐車スペースにおいて直進する歩行者を速度0.48m/sで走行するCATが回避できるかを評価した。実験の結果、直進する歩行者を回避できた。
(4)経路探索計画との統合実験
この実験では回避役Mouseに既存の経路探索計画とエリア細分化検知法を用いた回避プログラムを組み合わせて統合プログラムとし、実際に専用コースで走行させた。
実験の結果、統合プログラムは前方検知距離50㎝までなら経路探索計画との統合が可能であった(Table.2/略)。しかし、検知距離をさらにのばすと回避プログラムが経路探索計画を阻害し、本来通行可能な場所を走行できない場合があった。
実験の結果、回避役は多くの場合、歩行者役を回避することができた。但し以下のような衝突案件が起きた。
1) 歩行者役Mouseを回避するも、直後に壁を避けきれず衝突
2) 壁を回避して直後の出会いがしらで避けきれず、歩行者役Mouseに衝突
上記の衝突案件から前方検知距離を変更し、障害物の早期検知を可能にした(Table.2/略)。検知距離は40〜50㎝までは回避が可能であるが、60㎝以上では障害物検知が過敏すぎ、コース全体の走行はできなかった。なお、前方検知距離以外の検知距離は全て40㎝のままで行った。
(3)歩行者回避実験
本実験は実験(1)にて高性能であった回避プログラムをMouseからCATに実装した。実装後、研究室裏の駐車スペースにおいて直進する歩行者を速度0.48m/sで走行するCATが回避できるかを評価した。実験の結果、直進する歩行者を回避できた。
(4)経路探索計画との統合実験
この実験では回避役Mouseに既存の経路探索計画とエリア細分化検知法を用いた回避プログラムを組み合わせて統合プログラムとし、実際に専用コースで走行させた。
実験の結果、統合プログラムは前方検知距離50㎝までなら経路探索計画との統合が可能であった(Table.2/略)。しかし、検知距離をさらにのばすと回避プログラムが経路探索計画を阻害し、本来通行可能な場所を走行できない場合があった。
■ 考察
実験(1)においてエリア細分化検知法が最も高い回避能力を示した。これは障害物検知のエリアが増加したことで、障害物に対し適切な回避が可能となったからと考えられる。但し、実験(2)の特定状況における連続回避結果や、実験(4)のように経路探索計画との統合結果より、Table.2のように走行状況に合わせた障害物検知のパラメータ調整が重要であると考えられる。実験(3)ではCATの速度に合わせて前方検知距離を長く設定したことが、充分な回避ができたと考えられる。これらの実験はいずれも歩行者が単数の設定であり、今後は複数の歩行者を用いた連続回避など、様々な回避パターンを検証する必要があると考えられる。
■ 結論
本研究では生物のような反射的行動に類似したぶつからない回避行動を実現できるかを目的に研究を進めた。エリア細分化検知法であれば突発的に表れる歩行者や障害物をある程度避けることが可能である。また、低速ながら歩行者回避は実現できた。
本手法と経路探索アルゴリズムの統合を確認できたことで、人間のような計画的・反射的回避を持ち合わせた回避の実現に繋がると考えられる。本研究のような回避が実現されれば、自動運転の社会的信用が確立され、社会への普及が促進されると考えられる。
本手法と経路探索アルゴリズムの統合を確認できたことで、人間のような計画的・反射的回避を持ち合わせた回避の実現に繋がると考えられる。本研究のような回避が実現されれば、自動運転の社会的信用が確立され、社会への普及が促進されると考えられる。
-
 指導教員からのコメント
ヒューマンインタフェイス研究室教授 脇田 敏裕
指導教員からのコメント
ヒューマンインタフェイス研究室教授 脇田 敏裕
- この研究は、より安全な移動モビリティを実現するための回避能力向上を狙いとして行いました。近江君は、研究室配属された時点では必ずしも自律移動やプログラミングに詳しいわけではありませんでしたが、卒研テーマに取り組む傍ら、自ら勉強することで知識と研究能力を身につけ、立派な研究に仕上げました。また、他のメンバの実験にも積極的に関わることで、より広い知識を吸収しました。得られた研究結果は、新年度のモビリティづくりに生かしていく予定です。
-
 卒業研究学生からの一言
近江 洋樹
卒業研究学生からの一言
近江 洋樹
- まず、大学最後の一年にこの脇田研究室に所属できたことは私にとってとても光栄かつ幸運なことでした。脇田教授は私達研究生の能力を反映した上で研究スケジュールやこれから必要となってくるスキルの習得まで熱心に指導してくださいました。私はこれまでプログラミングの経験がありませんでしたが教授の熱心なご指導により、簡単なプログラムを書けるまでに至りました。そこで私は、改めて未経験分野への挑戦の重要性と理解できた時の喜びを学ぶことができました。
- 創造工学部自動車システム開発工学科(大学サイト )
- 教員紹介ページ(大学サイト )
- 研究室ナビ(大学サイト)
