卒業研究のご紹介
2021年版
機械・自動車・ロボット系所属学生
共同深層学習による自動運転レースカート
川島 優夢(代表者)兵庫県
創造工学部自動車システム開発工学科
2021年3月卒業
2021年3月卒業
兵庫県立神戸高塚高等学校出身
松田 輝神奈川県
創造工学部自動車システム開発工学科
2021年3月卒業
2021年3月卒業
神奈川県立二宮高等学校出身
研究の目的
近年、自動運転技術の向上と普及率拡大により、今まで取り入れられていなかった分野にまで自動運転が拡大した。市販車への普及率向上から推測するに、競技車両の自動運転化は目の前にあると考える。
多くの規定が定められている競技では、安全性はもちろんのこと、速度と正確性が求められる。競技走行において人間は自らが見ているコース情報を基に、走行経路を予測したうえで高速かつ正確に操縦している。
そこで本研究では、視覚から得た情報を基に、目的地へ向かうための指示を出すデータ処理を深層学習で行いレーシングカートに搭載した。目標は、カートレース場(対象:ドリーム平塚)で初心者並みの平均タイムで走行することとした。
多くの規定が定められている競技では、安全性はもちろんのこと、速度と正確性が求められる。競技走行において人間は自らが見ているコース情報を基に、走行経路を予測したうえで高速かつ正確に操縦している。
そこで本研究では、視覚から得た情報を基に、目的地へ向かうための指示を出すデータ処理を深層学習で行いレーシングカートに搭載した。目標は、カートレース場(対象:ドリーム平塚)で初心者並みの平均タイムで走行することとした。
研究内容や成果等
■ 実験装置及び方法1
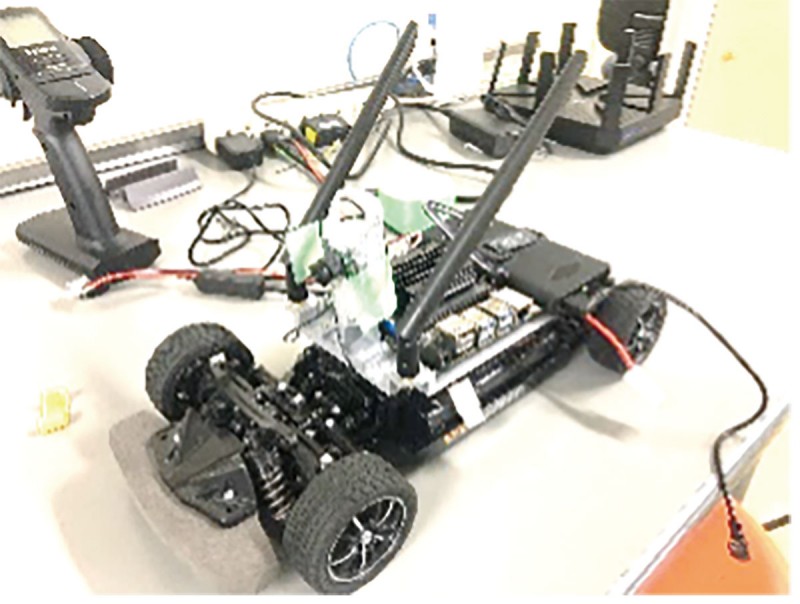
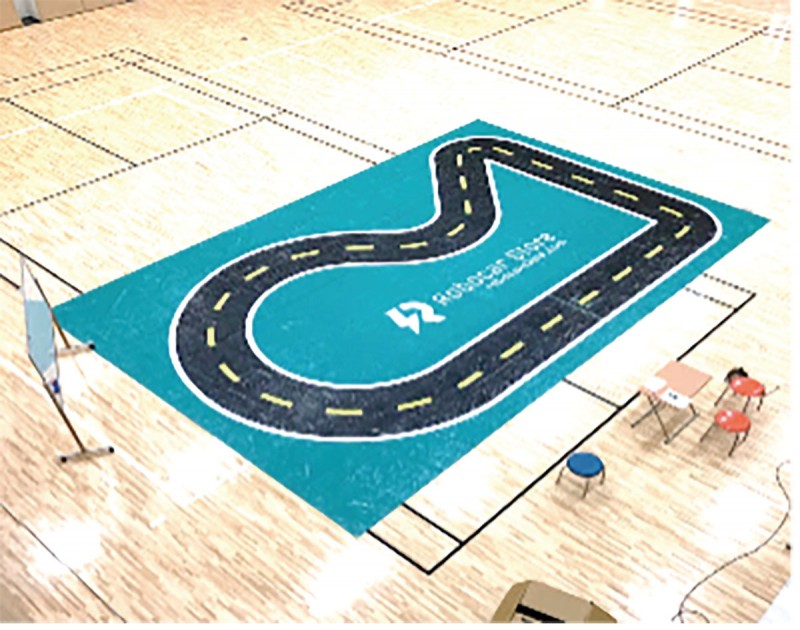
事前検討とaして、Jetson Nano(以下「Jetson」とする)を搭載したラジコンカー(以下「Jetracer」とする。Fig.1)を使用した。テストコース(5.36m×8.23m)はFig.2に示す。場所は本学C-5号館1階ロビー、Kaitアリーナで行った。
学習手順は以下通りである。
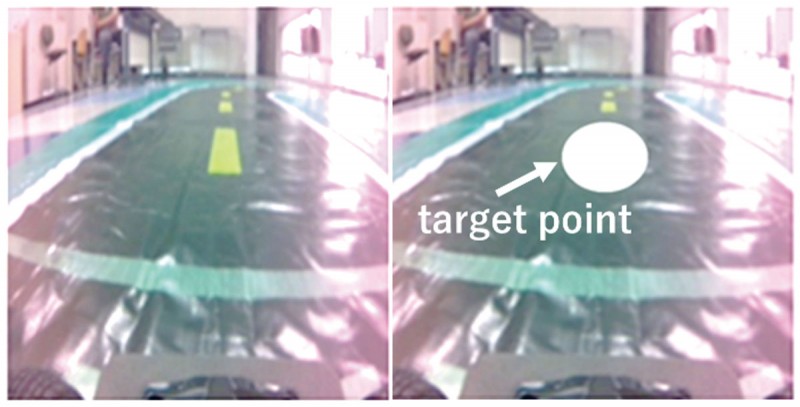
(1)Jetracerに搭載されたカメラで走路を、撮影目標点をプロットすることでデータ収集(Fig.3)
(2)撮影した写真データをJetson内で学習
(3)速度設定を行い自律走行
(4)コースに沿って走行するか確認
■ 結果及び考察1
最初に、本学C-5号館1階ロビーにて走行を行った。その結果、コース内の走行は困難であった。原因としては、窓から差し込む太陽光によって画像が白飛びし、誤認識が引き起こされ、コースアウトに至ったと考えられる。そのため、Kaitアリーナへ実験場所を移動し、再度走行実験を行った。その結果、安定した走行に繋がった。
走行時間は、1周最速ラップタイム9.45sで走行できた。人間の平均タイムが7.0sであるため、ほぼ初心者並みの走行が達成できた。
走行時間は、1周最速ラップタイム9.45sで走行できた。人間の平均タイムが7.0sであるため、ほぼ初心者並みの走行が達成できた。
■ 実験装置及び方法2
事前検討を終え、以下の実験材料を揃えた。
車体:CQ出版 EVミニカート(最大速度15km/h)
駆動用モーター:CQ出版 ブラシレス・モーター&インバータ・キット
駆動用バッテリー:LONG 12V9Ah 高性能シールドバッテリー
操舵用モーター:オリエンタルモーターαSTEP AZシリーズ
操舵用バッテリー:BMバイク用バッテリーBT4B-BS
制御コンピュータ:Jetson Nano
実験装置の完成形をFig.4に示す。
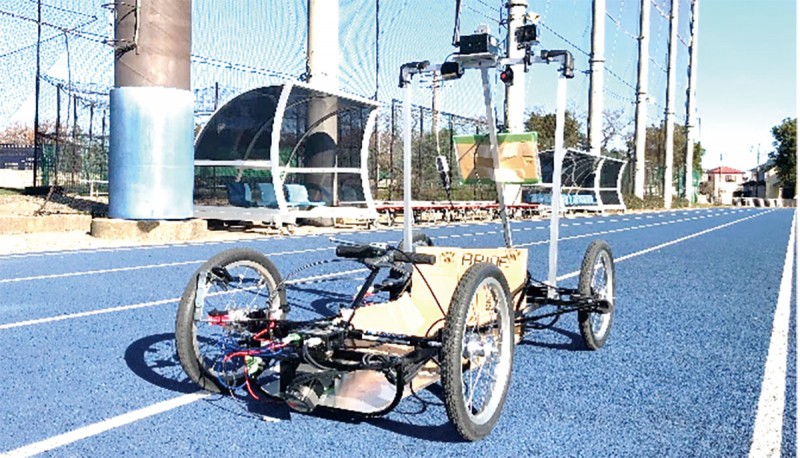
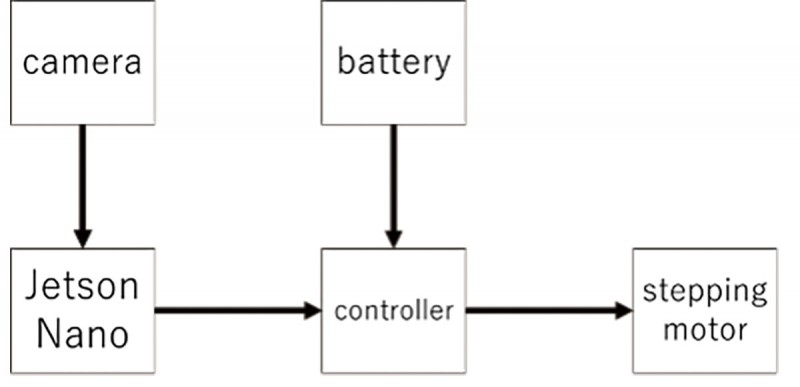
実験場所を学内にある陸上競技用400mトラック(以下「トラック」とする。Fig.5)へ移し、手順はJetracerと同様に行った。ただし、本実験では駆動用モーターは一定速度に設定し、操舵用モーターをJetsonにより制御した。ハードウェア構成をFig.6に示す。

■ 結果及び考察2
実験の結果、400mトラックに沿って最大速度15km/h、1周約120秒で周回することができた。
課題は、Jetracer同様に環境要因が働き、正常に走行しない場合があることである。データ例をFig.7に示す。(白〇:設定した目標点、黒●:Jetsonが出力した目標点)
課題は、Jetracer同様に環境要因が働き、正常に走行しない場合があることである。データ例をFig.7に示す。(白〇:設定した目標点、黒●:Jetsonが出力した目標点)
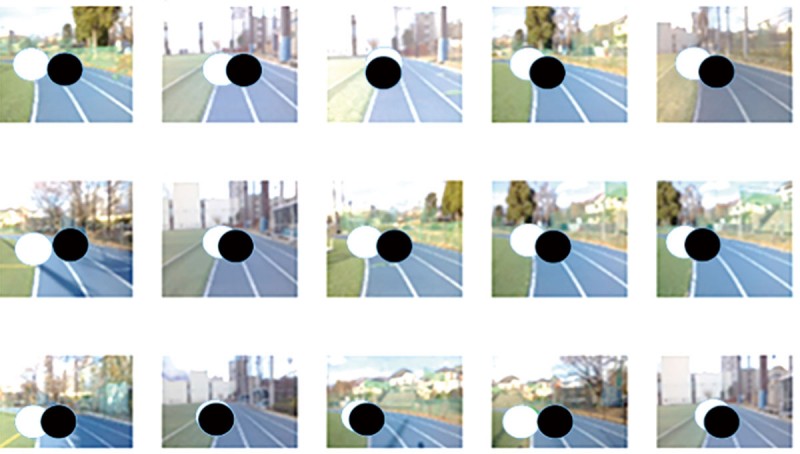
屋外ということもあり、Jetracer以上に環境要因に影響された。トラックレーンの誤認識例として、サッカーコートやベンチ、日差しによる影が挙げられる。晴天時の昼間は比較的影響が少なかった。また、実験場所が広大であるため通信を安定させる必要があった。さらに、人間搭乗状態で学習したため、無人走行させると重量変化により走行結果が異なった。走行性能を向上させるためには、これらの問題解決を行う必要があると考えられる。
■ 結論
本研究では、カートコースでの走行は至らなかったが、晴天の昼間に400mトラックを周回することに成功した。
上述の課題解決により、さらに安定した走行が期待できる。
上述の課題解決により、さらに安定した走行が期待できる。
-
 指導教員からのコメント
ヒューマンインターフェイス研究室教授 脇田 敏裕
指導教員からのコメント
ヒューマンインターフェイス研究室教授 脇田 敏裕
- この研究は、自動運転車レースへの第一歩として、AIを用いて本学トラック走行にチャレンジした取り組みです。特に今年度はコロナウイルスによる出校制限で、卒業研究の車両製作や実験を行える期間が極めて短期間でした。そういった逆境の中、模型車両の走行から開始して、学内での走行場所を探しながら技術を積み上げ、無事トラック走行を実現できました。コースや天候に対する安定性など課題はありますが、研究室では今後も技術を蓄積し、自動運転レースへの参戦を目指したいと思います。
-
 卒業研究学生からの一言
川島 優夢
卒業研究学生からの一言
川島 優夢
- 本学に入学できたことにより、日々の授業から最先端の技術やシステムに触れ、それについて学ぶことができました。自動車について専門的に学べる学科であった為、自分の好きなものを学べ、それについて研究を行えたので非常に成長でき、充実した4年間になったと思います。卒業研究では、テーマは皆違うものの研究室内で助け合うことができたことにより、目標達成に繋がったと感じます。脇田教授の元で、研究室の仲間達と切磋琢磨しながら研究に取り組んだ一年を誇りに思います。
- 創造工学部自動車システム開発工学科(大学サイト )
- 教員紹介ページ(大学サイト )
- 研究室ナビ(大学サイト)
