卒業研究のご紹介
2021年版
機械・自動車・ロボット系所属学生
曲線座標系を用いた自動運転制御アルゴリズムに関する研究
−コーナー、対向車を想定した自転車追越し場面について−
SUKITTIPATTANAKUL WARIT外国
大学院機械システム工学専攻 博士前期課程2021年3月修了
外国の学校出身
研究の目的
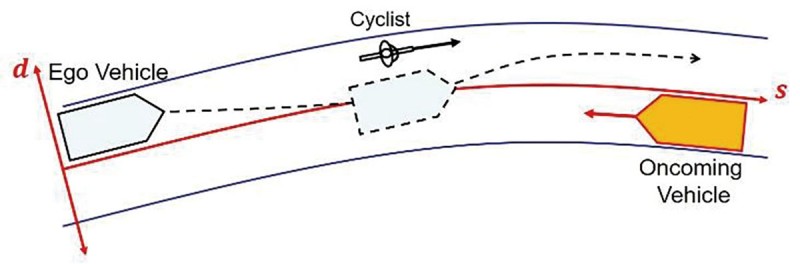
近年、安全安心な交通社会へ向け、運転支援システムや自動運転システムの研究開発が目覚ましい進歩を遂げている。自動運転システムは、認識、判断、運動計画、と運動制御などの技術で構成され、様々な走行状況に対応する。しかし、様々な走行状況のうち、前側方自転車の追越し場面は、自転車だけでなく、対向車も認識し追越し可能かの判断を必要とする難しい走行条件の一つである。また、道幅が狭く死角のあるカーブも含む市町村道では、前側方自転車追越しは自転車と対向車の行動把握や走行環境における潜在リスクなどを扱う自動運転制御アルゴリズムが必要である。そこで、本研究では、市町村道の様な視界の悪いコーナーを考慮した独自の前方視界モデルと、自車視界からの道路境界、障害物を表現しやすい曲線座標系を定義することで、実用的な前側方自転車追越し判断アルゴリズム(軌跡生成・運動制御を含む)の開発を目的とする。
研究内容や成果等
■ 本研究のシステム概要
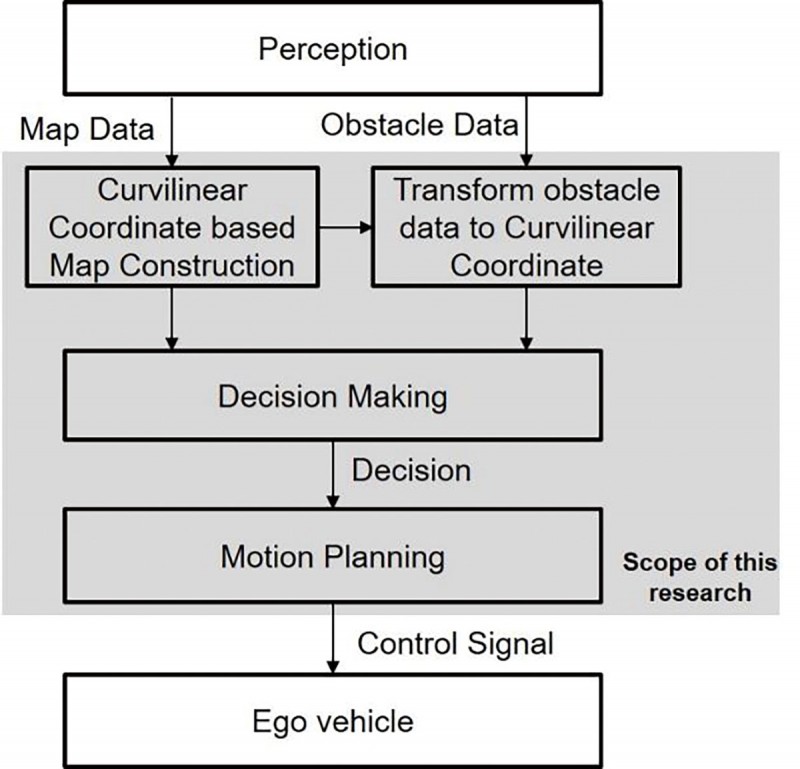
本研究のシステムは図2に示すように曲線座標系の地図の作成と座標換算、追越し判断アルゴリズム、運動計画で構成されている。
■ 曲線座標系
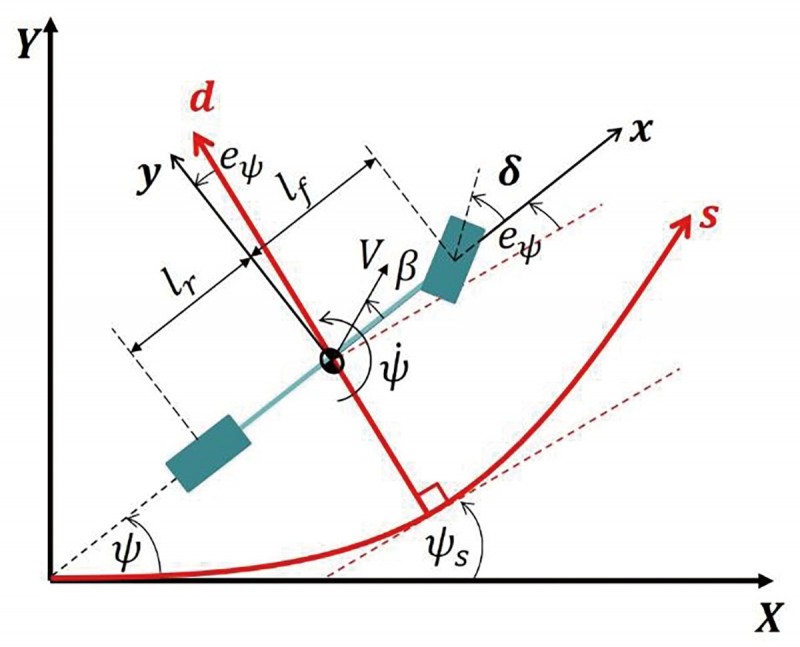
曲線座標系は、図1のように道路の中央線に沿う円弧距離sの軸と道路の中央線からの横変位dの軸でものを表す座標である。本研究の運動計画では図3に示す横滑り角を補正する運動的な二輪車両モデルを用いる。
■ 追越し判断アルゴリズム
(1)地図データに基づく視野推定モデル
本研究では地図情報を用いて道路の形状による認識の限界を推定する。
(2)追越しに関するパラメータ(省略)
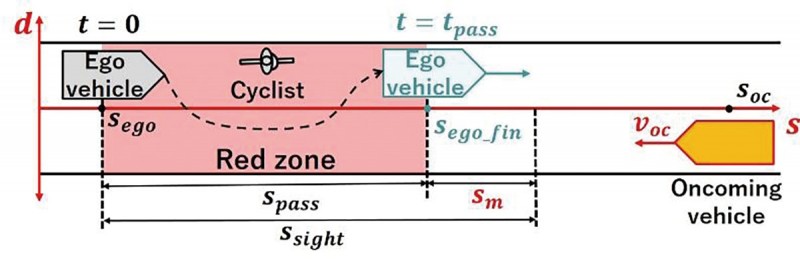
(3)安全余裕パラメータ(図5 Sm)
本研究では地図情報を用いて道路の形状による認識の限界を推定する。
(2)追越しに関するパラメータ(省略)
(3)安全余裕パラメータ(図5 Sm)
(4)追越し判断アルゴリズムの流れ
追越しの可否を判断する際には、以下のように項目を順々に確認する。
追越しの可否を判断する際には、以下のように項目を順々に確認する。
1.追い越しの距離:追い越しの距離より十分な認識系の視野があることを確認する。
2.対向車の存在:認識できる領域に対向車線にある障害物(対向車)の存在を確認する。ただし、対向車がレッドゾーンに存在する場合には、追越しが不可能となる。
3.追越しの時間:対向車がレッドゾーンに到達する時間より、追越しの時間が十分であることを確認する。
■ 曲線座標系上の運動計画
本研究の運動計画は、目標加速度の算出と目標実舵角の算出に分けられている。まず、追越し判断アルゴリズムからの決定に従う自車の目標速度プロファイルを作成後、この目標速度プロファイルに導く目標加速度を算出する。
(1)目標加速度の算出(省略)
(2)目標実舵角の算出(省略)
(1)目標加速度の算出(省略)
(2)目標実舵角の算出(省略)
■ シミュレーション実験
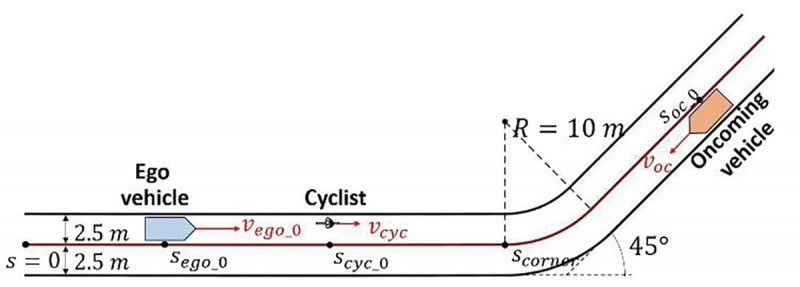
本研究では、MATLAB/Simulinkを使い、図8に示すように自車両、自転車、対向車、コーナーを含む市町村道等の要素を入れ、本「前方並走自転車の追越しアルゴリズム」の効果検証を行った。
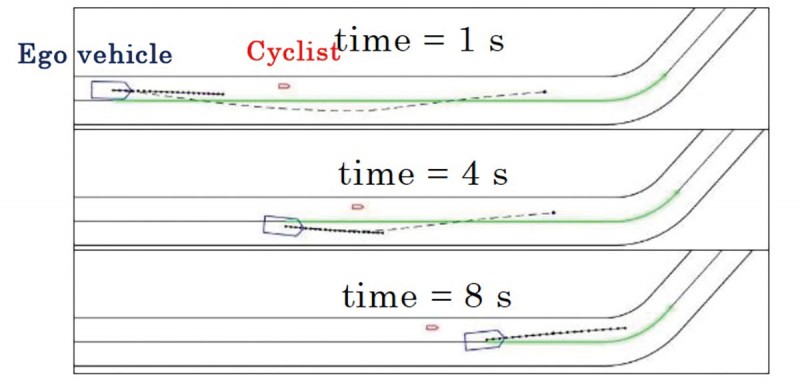
(1)対向車を考慮しない場面
自車初期位置sego_0=35m、自車初期速度vego_0=30km/hr、自転車の初期位置scyc_0=60m、自転車の速度vcyc=9km/hr(一定)、コーナーの位置scorner=100mとし、実験結果を図9に示す。図9によると視野の余裕があるので、自車がコーナーの前に自転車を追越しした。
自車初期位置sego_0=35m、自車初期速度vego_0=30km/hr、自転車の初期位置scyc_0=60m、自転車の速度vcyc=9km/hr(一定)、コーナーの位置scorner=100mとし、実験結果を図9に示す。図9によると視野の余裕があるので、自車がコーナーの前に自転車を追越しした。
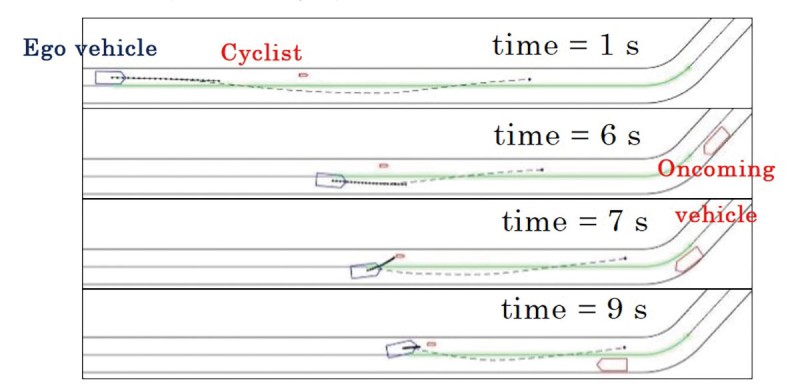
(2)対向車を考慮する場面
自車初期位置sego_0=35m、自車初期速度vego_0=30km/hr、自転車の初期位置scyc_0=60m、自転車の速度vcyc_0=6km/hr(一定)、対向車の初期位置soc_0=60m、対向車の速度voc=20km/hr(一定)、コーナーの位置scorner=100mとし、シミュレーション結果を図10に示す。それによると視野の余裕があるので、自車がコーナーの前に自転車を追越ししようとした。だが、コーナーによる死角から対向車が迫ってくるので、車両が自車線に戻ってから自転車を追従する。
自車初期位置sego_0=35m、自車初期速度vego_0=30km/hr、自転車の初期位置scyc_0=60m、自転車の速度vcyc_0=6km/hr(一定)、対向車の初期位置soc_0=60m、対向車の速度voc=20km/hr(一定)、コーナーの位置scorner=100mとし、シミュレーション結果を図10に示す。それによると視野の余裕があるので、自車がコーナーの前に自転車を追越ししようとした。だが、コーナーによる死角から対向車が迫ってくるので、車両が自車線に戻ってから自転車を追従する。
■ 結言
本制御アルゴリズムは曲線座標系に基づき設計された点を特徴とし、これにより車両制御や軌跡生成の設計が簡潔になった。また、本制御アルゴリズムは行動判断と運動計画の各制御部で構成しているのに加え、地図データに基づく視野推定モデルを用い道路形状による車両視野の限界を予測する。さらに、運動計画では速度プロファイルとリスクポテンシャルを用い、安全で最適な目標軌跡を生成する特徴がある。また、MATLAB/Simulinkシミュレーションにより、本制御アルゴリズムが様々な走行条件で自転車を安全に追越しするロバスト性をもつことが確認できた。
-
 指導教員からのコメント
自動運転・運転支援研究室教授 井上 秀雄
指導教員からのコメント
自動運転・運転支援研究室教授 井上 秀雄
- 本研究は、これから自動運転で重要になってくる「運転知能」の研究分野で先鞭を切る貴重な研究です。現在の自動運転では、コースに沿って自動で走り、障害物を回避することはできますが、熟練ドライバの様に様々な走行シーンで、これから起こる状況を予測し安全且つスムーズな運転操作を判断する知能化の部分は、まだ発展途上です。本研究では、コーナーで対向車がくるかもしれない状況で、前方自転車を安全に追従・追越しを判断する運転知能アルゴリズムを開発した世界初の画期的なものです。本研究を皮切りに、運転知能の研究分野が発展していくことを期待しています。
-
 修士研究学生からの一言
SUKITTIPATTANAKUL WARIT
修士研究学生からの一言
SUKITTIPATTANAKUL WARIT
- 自動車の知能化に関する研究活動では、様々な知識や学力が必要だと思います。そのため自分が好きな自動車工学に加え、コンピュータプログラミングの知識も身につけました。特に、MATLAB/Simulinkなどのシミュレーションソフトを使用することにより、様々な知識や技術を身につけることができ、視野を広げられたことは良かったと思います。さらに、教授の温かいご指導と研究室の皆様の協力をいただいて研究が順調にでき、貴重な経験だったと思います。
- 大学院機械システム工学専攻 博士前期課程(大学サイト )
- 研究室ナビ(大学サイト)
