卒業研究のご紹介
2020年版
機械・自動車・ロボット系所属学生
路面μを考慮した先読みブレーキ制御の研究
島崎 達哉神奈川県
大学院機械システム工学専攻 博士前期課程 2020年3月修了
(創造工学部自動車システム開発工学科 2018年3月卒業)
(創造工学部自動車システム開発工学科 2018年3月卒業)
鶴見大学附属高等学校出身
研究の目的
近年、衝突被害軽減ブレーキなどの運転支援システム搭載により自動車の安全技術が向上しています。しかし、無信号交差点に着目すると住宅街の建物や駐車車両など死角から急に飛び出す歩行者や自転車との出会い頭事故では、カメラ等のセンサが歩行者や自転車を認識してから衝突被害軽減ブレーキ(以下AEBS)が作動するため、衝突を避けられない場合もあります。また、道路環境に着目すると雨天時の1時間あたりの事故件数が晴天時より約4倍多いことが分かっており、特に路面が滑りやすい状況では現在のシステムでは効果が望めません。そこで本研究では、AEBSでは対応困難な無信号交差点での出会い頭事故と低路面μ時の2つの課題に着目し改善の方向性を示しました。具体的には、路面μを考慮した減速制御開始地点を定義することでμ推定と飛出しのリスク予測を開始し安全な適正速度で無信号交差点を通過する事故回避システムの提案を目的としました。
研究内容や成果等
■ 先読みブレーキ制御の概要
(1)着目している運転フェーズについて
人間が自動車を運転する際には衝突余裕時間Time to Collision(以下TTC)を基準にして通常運転、かもしれない運転、緊急回避行動の主に3つの運転フェーズに区分される。近年,運転支援技術の開発・実用化が進んでいるが、TTCが1〜5[s]のかもしれない運転のフェーズは、実用化に至っていない。図1(略)に運転フェーズと、実用化されている運転支援システムの具体例を示す。
(2)先読みブレーキ制御について
無信号交差点における出会い頭事故を想定してシミュレーションを行った。本研究では、これまでに開発・検証されている「先読みブレーキ制御」を用いた減速制御を行う。「先読みブレーキ制御」とは、急な飛び出し歩行者や自転車のリスクを予測し無信号交差点手前からあらかじめ減速させる制御を「先読みブレーキ制御」と呼ぶ。図2(略)に路面μを考慮した先読みブレーキ制御ロジックの概要を示す。
(3)重みづけμ推定
本研究では更なる先読みブレーキ制御の効果拡張を目指し路面μを考慮する。路面μを考慮することにより、低μ路面時に車両前後方向に対する適正な停止距離を確保することが可能になると考えられる。
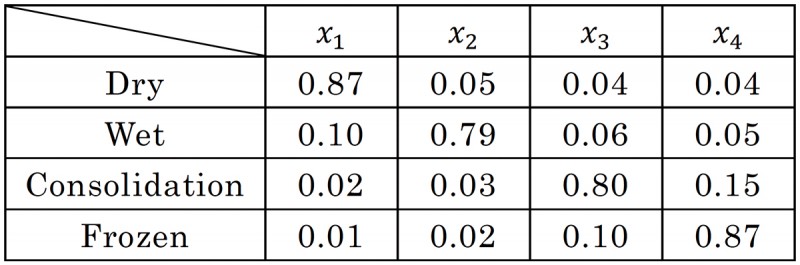
一般的に路面μをセンサなどで決定する事は困難である。本研究では,乾燥路μ1=0.80,湿潤路μ2=0.55,圧雪路μ3=0.30,凍結路μ4=0.15 の4つを設定した。走行中に天候情報、交通情報、ワイパー動作など事前情報を得られたと仮定する。これらの情報を基に各路面μの重みづけ係数を決定し、重回帰式を用いて路面μの推定を行う。この確からしい路面μを「重みづけμ」と呼ぶ。式(1)に重みづけμ:μwを示す。また、表1に重みづけ係数例を示す。
人間が自動車を運転する際には衝突余裕時間Time to Collision(以下TTC)を基準にして通常運転、かもしれない運転、緊急回避行動の主に3つの運転フェーズに区分される。近年,運転支援技術の開発・実用化が進んでいるが、TTCが1〜5[s]のかもしれない運転のフェーズは、実用化に至っていない。図1(略)に運転フェーズと、実用化されている運転支援システムの具体例を示す。
(2)先読みブレーキ制御について
無信号交差点における出会い頭事故を想定してシミュレーションを行った。本研究では、これまでに開発・検証されている「先読みブレーキ制御」を用いた減速制御を行う。「先読みブレーキ制御」とは、急な飛び出し歩行者や自転車のリスクを予測し無信号交差点手前からあらかじめ減速させる制御を「先読みブレーキ制御」と呼ぶ。図2(略)に路面μを考慮した先読みブレーキ制御ロジックの概要を示す。
(3)重みづけμ推定
本研究では更なる先読みブレーキ制御の効果拡張を目指し路面μを考慮する。路面μを考慮することにより、低μ路面時に車両前後方向に対する適正な停止距離を確保することが可能になると考えられる。
一般的に路面μをセンサなどで決定する事は困難である。本研究では,乾燥路μ1=0.80,湿潤路μ2=0.55,圧雪路μ3=0.30,凍結路μ4=0.15 の4つを設定した。走行中に天候情報、交通情報、ワイパー動作など事前情報を得られたと仮定する。これらの情報を基に各路面μの重みづけ係数を決定し、重回帰式を用いて路面μの推定を行う。この確からしい路面μを「重みづけμ」と呼ぶ。式(1)に重みづけμ:μwを示す。また、表1に重みづけ係数例を示す。

(4)減速終了位置・最終徐行速度算出
図3に無信号交差点付近での出会い頭事故を想定した概要図を示す。交差点位置が事前に分かったものと仮定する。
図3に無信号交差点付近での出会い頭事故を想定した概要図を示す。交差点位置が事前に分かったものと仮定する。
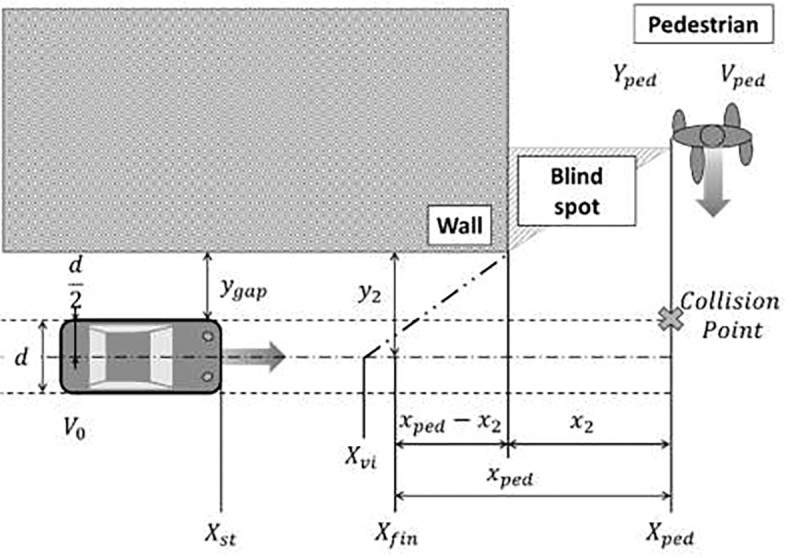
TTCは無信号交差点で自車と歩行者(自転車)が衝突するとした場合の余裕時間を示す。歩行者(自転車)がYped進むまでの時間Tped及び、自車がXfin~Xped進むまでの時間Tcarは、式(2)、(3)で示す。
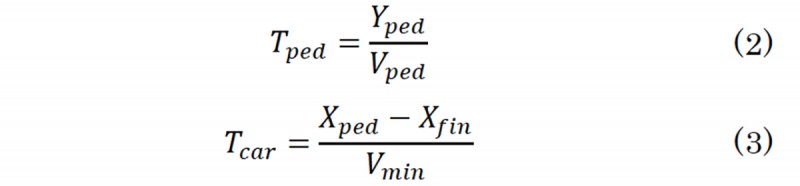
ここで、Tped=Tcarと仮定すると、TTCcar_ped=0[s]で両者が衝突することを示す。式(2)、(3)より式(4)が得られる。

図2で歩行者(自転車)が塀の死角から飛び出す時、歩行者(自転車)と自車までのy方向の距離は相似の関係から式(5)が求まる。

次に、運動の第2法則式(6)より最大加速度(減速度)amaxを式(7)に示す。重力加速度g=9.81[m/s2]とする。

式(7)より最終徐行速度Vminを式(8)(略)、最終減速終了位置Xfinを式(9)(略)に示す。τxはドライバ反応時間を表す。
(5)減速制御開始位置算出
低μ路では、高μ路と比較して停止距離が長くなり、出会い頭事故のリスクがより高くなると考えられる。そこで、低μ路での停止距離に余裕を与えるために路面μに応じて減速開始位置の算出を行う。式(10)に示す等加速度直線運動式を用いる。
(5)減速制御開始位置算出
低μ路では、高μ路と比較して停止距離が長くなり、出会い頭事故のリスクがより高くなると考えられる。そこで、低μ路での停止距離に余裕を与えるために路面μに応じて減速開始位置の算出を行う。式(10)に示す等加速度直線運動式を用いる。

式(10)に式(8)と式(9)を代入する。V0は減速前速度を示し、apbcは先読みブレーキ制御の最大加速度を表す。本研究では、凍結路でもブレーキ制御が可能な減速度であるapbc=−1.5[m/s2]とする。

式(11)を整理すると式(12)路面μを考慮した減速開始位置Xstが得られる。

(6)極低μ路の判定
先読みブレーキ制御開始時に、最悪状況を回避するために極低μの判断を行う。判断方法として物理的に取得することができるタイヤスリップ率を用いる。通常走行時ではタイヤスリップ率が0.10以上になる状況は少ない。そこで、制御開始時点でスリップ率が0.10以上の場合、本研究で定義している凍結路μ=0.15以下であると判断した時点から事故回避・被害軽減のために再度Vminに反映させる。これにより、交差点通過速度を落とすことができる。車両速度: V[m/s]、タイヤ有効半径:γ[m]、車輪速度:ω[rad/s]とし、制動時のタイヤスリップ率を式(13)に示す。
先読みブレーキ制御開始時に、最悪状況を回避するために極低μの判断を行う。判断方法として物理的に取得することができるタイヤスリップ率を用いる。通常走行時ではタイヤスリップ率が0.10以上になる状況は少ない。そこで、制御開始時点でスリップ率が0.10以上の場合、本研究で定義している凍結路μ=0.15以下であると判断した時点から事故回避・被害軽減のために再度Vminに反映させる。これにより、交差点通過速度を落とすことができる。車両速度: V[m/s]、タイヤ有効半径:γ[m]、車輪速度:ω[rad/s]とし、制動時のタイヤスリップ率を式(13)に示す。

■ シミュレーションシステム概要
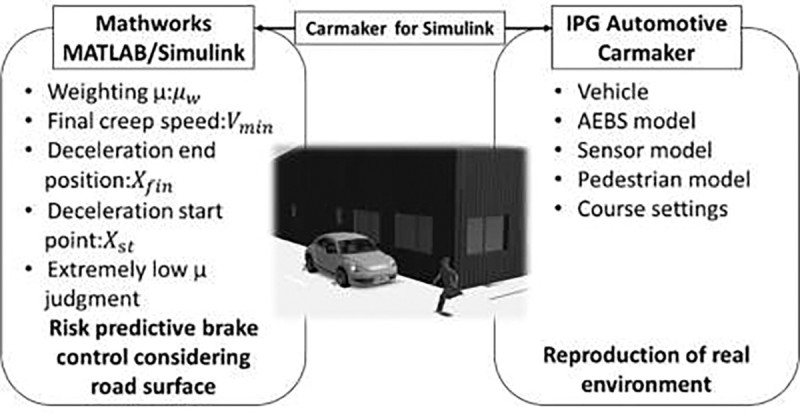
本研究でのシミュレーションシステム概要を図4に示す。Matlab/Simulink と Carmaker を使用して SIL(Software In the Loop)でシミュレーション実験を行った。Matlab/Simulink では、重みづけμ、最終徐行速度Vmin、減速終了位置Xfin、減速開始位置Xst、目標減速度などの先読みブレーキ制御に必要な演算を行っている。Carmakerでは、車両、AEBSモデル、センサモデル、歩行者モデル、コース設定などより実環境に近い形でシミュレーションを行うために使用する。また、Matlab/Simulinkから提供されている API(Application Programming Interface)機能である Carmakaer for Simulinkを使用することにより、Matlab/Simulink内で演算された先読みブレーキ制御の目標減速度をCarmaker側に与え車両を減速させる。
(1)シミュレーション実験概要
構築した路面μを考慮した先読みブレーキ制御モデルの有効性をシミュレーション実験で確認した。図5(略)にシミュレーションコースを示す。
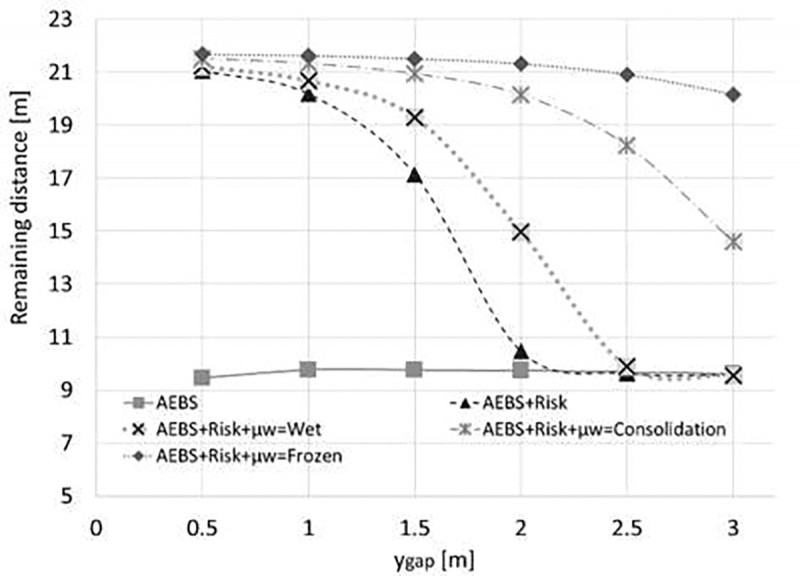
コース路面μは、乾燥路μ=0.80、湿潤路μ=0.55、圧雪路μ=0.30、凍結路μ=0.15、の4条件とした。自車〜壁までの距離ygapは0.5〜3.0[m]まで0.5[m]刻みで増加させ6条件とした。自車初期速度V0=40[km/h]、ドライバ反応時間τx=0.60[s]、歩行者の飛び出し速度Vped=8[km/h]、歩行者~塀x2=1.0[m]とした。歩行者の飛び出しタイミングは、AEBS制御と比較するためにAEBS制御のみを搭載した車両が、車両左前方を衝突位置に設定しTTC=0.80[s]で飛び出し歩行者が到達するように動作を開始する。
(2)実験結果
図6(略)に圧雪路μ=0.30、ygap=1.5[m]の各制御結果の速度比較を示す。図7(略)にygap=1.5[m]時の各路面μの速度比較を示す。図8に歩行者が衝突位置に到達した時点の自車と歩行者までの残り距離とygapの関係性を示す。
(3)考察
図6(略)よりAEBSだけでは回避不可能だった状況で先読みブレーキ制御により出会い頭事故を回避できたことが分かる。また、図7(略)ではμwに応じて最終減速終了位置Vminと減速開始位置Xstが適応し、歩行者への衝突を回避できている。また、センサ視野による歩行者検出ポイントXviでも、衝突回避可能な車速まで低下しており、TTC=0.80[s]で飛び出すと設定した歩行者が到達までに、路面μに応じた十分な制動距離が確保されている。
図8は、歩行者が衝突位置に到達したときの余裕距離と自車〜壁までの距離ygapの関係を示したものである。ygapが1[m]以下では、AEBSの余裕距離に比較して、先読みブレーキ制御の効果により生じた余裕距離が、低μ路においても十分な余裕となることが読み取れる。しかし、ygapが1[m]以上では、μが解らなければ余裕距離は、路面μが上がれば余裕はなくなる。ygapが大きくなれば余裕距離が短縮するという結果となったが、これは、ygapが大きくなるに従って、センサ視野による歩行者検出ポイントXviが手前となり、AEBSへの依存度が高まるアルゴリズムなっている為と考えられ、改良が必要である。
構築した路面μを考慮した先読みブレーキ制御モデルの有効性をシミュレーション実験で確認した。図5(略)にシミュレーションコースを示す。
コース路面μは、乾燥路μ=0.80、湿潤路μ=0.55、圧雪路μ=0.30、凍結路μ=0.15、の4条件とした。自車〜壁までの距離ygapは0.5〜3.0[m]まで0.5[m]刻みで増加させ6条件とした。自車初期速度V0=40[km/h]、ドライバ反応時間τx=0.60[s]、歩行者の飛び出し速度Vped=8[km/h]、歩行者~塀x2=1.0[m]とした。歩行者の飛び出しタイミングは、AEBS制御と比較するためにAEBS制御のみを搭載した車両が、車両左前方を衝突位置に設定しTTC=0.80[s]で飛び出し歩行者が到達するように動作を開始する。
(2)実験結果
図6(略)に圧雪路μ=0.30、ygap=1.5[m]の各制御結果の速度比較を示す。図7(略)にygap=1.5[m]時の各路面μの速度比較を示す。図8に歩行者が衝突位置に到達した時点の自車と歩行者までの残り距離とygapの関係性を示す。
(3)考察
図6(略)よりAEBSだけでは回避不可能だった状況で先読みブレーキ制御により出会い頭事故を回避できたことが分かる。また、図7(略)ではμwに応じて最終減速終了位置Vminと減速開始位置Xstが適応し、歩行者への衝突を回避できている。また、センサ視野による歩行者検出ポイントXviでも、衝突回避可能な車速まで低下しており、TTC=0.80[s]で飛び出すと設定した歩行者が到達までに、路面μに応じた十分な制動距離が確保されている。
図8は、歩行者が衝突位置に到達したときの余裕距離と自車〜壁までの距離ygapの関係を示したものである。ygapが1[m]以下では、AEBSの余裕距離に比較して、先読みブレーキ制御の効果により生じた余裕距離が、低μ路においても十分な余裕となることが読み取れる。しかし、ygapが1[m]以上では、μが解らなければ余裕距離は、路面μが上がれば余裕はなくなる。ygapが大きくなれば余裕距離が短縮するという結果となったが、これは、ygapが大きくなるに従って、センサ視野による歩行者検出ポイントXviが手前となり、AEBSへの依存度が高まるアルゴリズムなっている為と考えられ、改良が必要である。
■ 結言
先読みブレーキ制御における、μwに応じて最終徐行速度Vminと減速開始位置Xstの決定方法を構築することができた。これを基に無信号交差点通過時の路面μを考慮した先読みブレーキ制御アルゴリズムの糸口を得ることができた。しかし、ygapに対する余裕距離の決定にはアルゴリズムの改良が必要である。
-
 指導教員からのコメント
自動運転・運転支援研究室教授 井上 秀雄
指導教員からのコメント
自動運転・運転支援研究室教授 井上 秀雄
- 現在、歩行者など前方障害物に対する衝突被害軽減ブレーキ(AEB; Automated Emergency Brake)が、広く採用されています。しかし、これらは減速度約0.6G以上をベースとした、高路面摩擦係数(μ)前提の急ブレーキシステムで、Wet路、雪上、氷上などの低μ路面摩擦条件では、衝突の被害軽減ができない可能性があります。本研究は、低μの場合でも見えない無信号交差点などの人の飛び出しを想定し、どのくらい前から路面μを判断し、適正速度に減速にすれば良いかを判断するアルゴリズムを構築しました。これにより機械が低μでも交差点での飛び出しを予期し、違和感のない適正ブレーキ制御が可能となります。これも、今後、実用化が期待される技術です。
-
 修士研究学生からの一言
島崎 達哉
修士研究学生からの一言
島崎 達哉
- 研究活動を通して、既存の運転支援システムだけでは対応しきれない状況がまだまだ多数あることを学びました。研究を進めていくにあたり何が課題で、目的は何か、課題解決に対しての考え方や研究計画など少しは身につけることができたと思います。また、研究室メンバーと意見交換や手伝いなどを行ったことで違った視点の意見や考え方を取り入れることの大切さを学ぶことができました。さらに、普通には使うことのできないシミュレーションソフトや機械を使用することができ、とても良い経験ができました。
- 創造工学部自動車システム開発工学科(大学サイト )
- 教員紹介ページ(大学サイト )
- 研究室ナビ(大学サイト)
