卒業研究のご紹介
2018年版
機械・自動車・ロボット系所属学生
自動運転研究におけるシステムアーキテクチャの構築
關野 修東京都
大学院機械システム工学専攻 博士前期課程1年
(創造工学部自動車システム開発工学科2018年3月卒業)
(創造工学部自動車システム開発工学科2018年3月卒業)
日本工業大学駒場高等学校出身
研究の目的
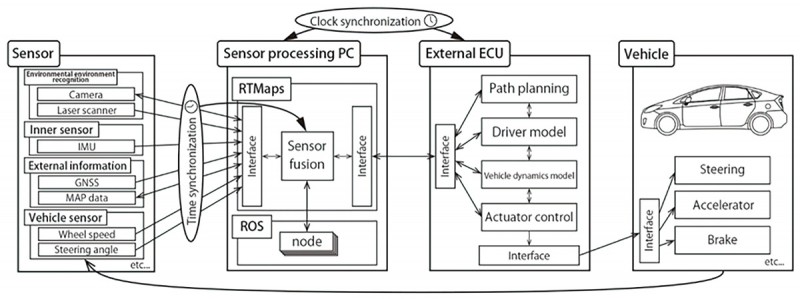
近年のクルマの自動運転技術の研究・開発にはセンサから得たデータを併せて認識機能を高めるセンサーフュージョンや、地図データを組み合わせたパスプランニング、機械指令とドライバ指令の干渉の調停など複数の制御ブロックで構成され、多様な技術が必要となり、各制御ブロックの入出力のインターフェース設計と検証方法は重要な課題となっている。それらの研究ができる実験車両に、新たに時刻同期を考慮した機能をもつシステムアーキテクチャを構築することを目的とした。
研究内容や成果等
構築したアーキテクチャを使い、独自に作成したIMU(慣性計測装置)とGNSS(衛星測位システムの総称)における時刻同期処理の実例で、その有効性を検証した。これらは、完全自動運転の研究だけでなく、人間とクルマが助け合って運転するシェアードコントロールという技術や、フロントガラスに運転を支援してくれるような映像の投影ができるなど、多種多様なことが検証できるように構築した。

自動車産業界でも最先端の研究である自動運転・知能化システムのアーキテクチャの卒論テーマに果敢にチャレンジしてくれてありがとうございました。カメラやレーダ等のセンサの同期技術やクルマの自己位置推定技術を織込むことができレベルの高い研究成果を達成して頂いたと思います。他の学生へのアドバイスや共同研究先の企業からも信頼され、大学での内容の濃い経験を積まれたことと思います。今後大学院に進むわけですが、この研究成果を基に更なる創造性豊かな研究テーマに一緒に取組んでいきましょう。
クルマの実物に触れることができる点がよかったです。実物に触って動かすことで、理論からシミュレーション、実車への組み込み、実験、評価の一通りを行えるようになりました。また、実車への組み込みなどはトラブルが付き物なので、問題解決能力も身についたと思います。