卒業研究のご紹介
2021年版
機械・自動車・ロボット系所属学生
共同安全性評価のための自動運転実験装置の実行方法に関する考察
上原 達輝(代表者)神奈川県
創造工学部自動車システム開発工学科
2021年3月卒業
2021年3月卒業
神奈川県立平塚工科高等学校出身
川上 智己神奈川県
創造工学部自動車システム開発工学科
2021年3月卒業
2021年3月卒業
神奈川県立綾瀬西高等学校出身
研究の目的
本研究の目的は、近年の交通事故の発生状況と評価機関の現状を調査し、事故回避システムや自動運転システムの評価は今後どのようにあるべきか考察を加えるものである。
また、多様な交通環境において、事故回避システムや自動運転システムを詳細に評価するためには、多岐にわたる試験シナリオの実施が必要であり、結果として試験項目が膨大となることが予想される。このような状況を受けて、最近では自律動作するダミー車、ダミー歩行者といった、試験実施を自動化するツールが開発されている。本研究では、これらの装置の原理や使用方法を調査するとともに、実際にテストコースにて装置を稼働させ、想定シナリオの再現性といった装置の有効性を検証することも、もう一つの目的とした。
また、多様な交通環境において、事故回避システムや自動運転システムを詳細に評価するためには、多岐にわたる試験シナリオの実施が必要であり、結果として試験項目が膨大となることが予想される。このような状況を受けて、最近では自律動作するダミー車、ダミー歩行者といった、試験実施を自動化するツールが開発されている。本研究では、これらの装置の原理や使用方法を調査するとともに、実際にテストコースにて装置を稼働させ、想定シナリオの再現性といった装置の有効性を検証することも、もう一つの目的とした。
研究内容や成果等
■ 実験装置の調査
(1)ダミー車両のシステム構成と動作方法
今回使用したABDynamics社製のNCAP用ダミー車、ステリングロボット/ペダルロボット搭載車等の調査結果を以下に示す。衝突の可能性のある実験のためダミー車はウレタン部材で構成されており衝突してもバラバラになり評価車両へのダメージがない上に再生可能である(図1)。また、ミリ波センサやカメラの検出の為に、サイドミラー、テールランプ、後方ナンバープレート付近に反射板が設置されている。さらに走行可動部は図2に示す平板プレート部に構成され走行制御装置が内蔵されている。自動走行制御は主にRTK-GNSS、IMUにより自己位置を計測し、予め設定した目標コースと速度プロファイルによって制御される。また、WiFi通信によりそれぞれの相対的位置関係も制御する。
今回使用したABDynamics社製のNCAP用ダミー車、ステリングロボット/ペダルロボット搭載車等の調査結果を以下に示す。衝突の可能性のある実験のためダミー車はウレタン部材で構成されており衝突してもバラバラになり評価車両へのダメージがない上に再生可能である(図1)。また、ミリ波センサやカメラの検出の為に、サイドミラー、テールランプ、後方ナンバープレート付近に反射板が設置されている。さらに走行可動部は図2に示す平板プレート部に構成され走行制御装置が内蔵されている。自動走行制御は主にRTK-GNSS、IMUにより自己位置を計測し、予め設定した目標コースと速度プロファイルによって制御される。また、WiFi通信によりそれぞれの相対的位置関係も制御する。


(2)ロボット操作装置による評価車両の制御方法
評価車両を想定した自動走行制御もシステム制御原理は、ダミー車と同じである。今回の実験では、通常の車両にステアリングロボットとペダルロボットを人間ドライバの代替として装着し、再現性の良い運転操作を可能とする。この車両の使い方には、本来の評価車両だけでなく、ダミー車と併せシナリオ実施上の周辺車両の役割も可能である。
評価車両を想定した自動走行制御もシステム制御原理は、ダミー車と同じである。今回の実験では、通常の車両にステアリングロボットとペダルロボットを人間ドライバの代替として装着し、再現性の良い運転操作を可能とする。この車両の使い方には、本来の評価車両だけでなく、ダミー車と併せシナリオ実施上の周辺車両の役割も可能である。

(3)ダミー歩行者の構成と動作方法
現在、NCAPの駐車車両陰からの歩行者飛出し時のAEB評価で使用構造の歩行者ダミーの作動例を図4に示す。NCAPでは、進化版として制御プレート使用の歩行者や自転車ダミー等が用意される。
現在、NCAPの駐車車両陰からの歩行者飛出し時のAEB評価で使用構造の歩行者ダミーの作動例を図4に示す。NCAPでは、進化版として制御プレート使用の歩行者や自転車ダミー等が用意される。

■ 実験結果と考察
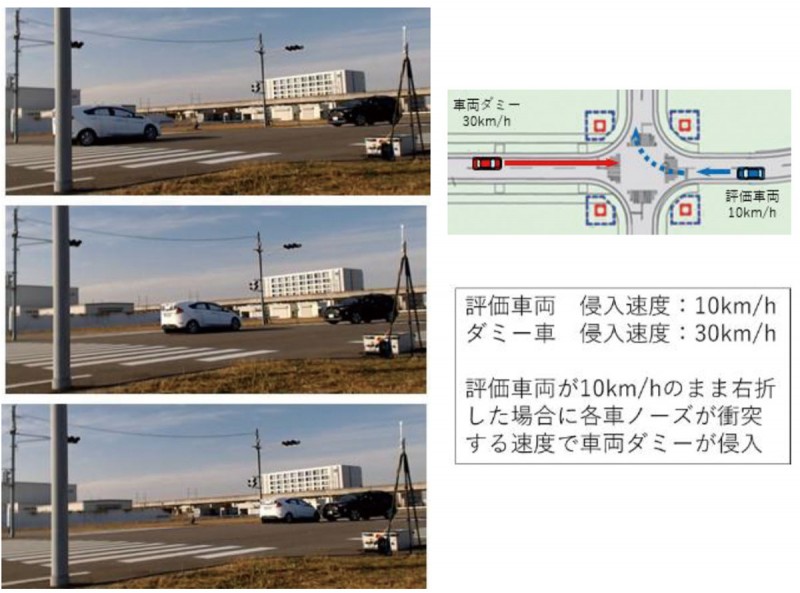
(1)交差点右直AEB評価試験
AEB装着の評価車両が交差点を右折するタイミングで車両ダミーが直進してくるシナリオの実験結果を図5示す。この評価車両のAEBが作動しないことを評価した。また、両車の走行条件が制御されているため、5回程度のテストを行い再現性が良い結果を確認できた。
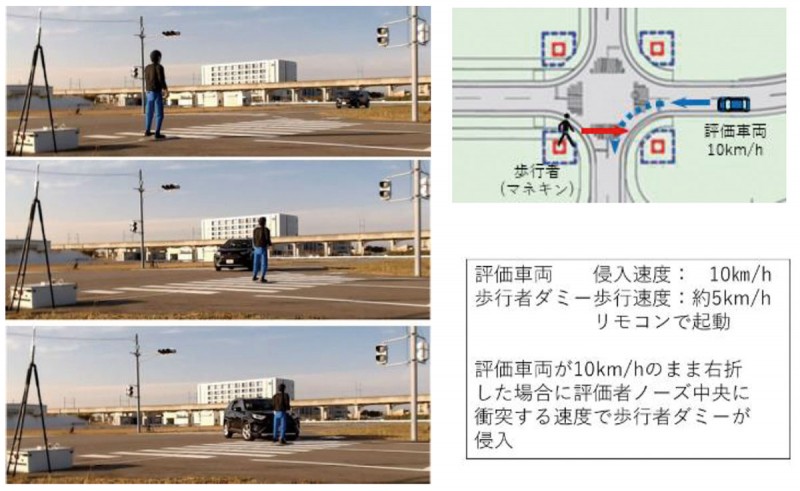
(2)交差点左折時横断歩行者AEB評価試験
評価車両が交差点を左折するタイミングで歩行者ダミーが横断してくるシナリオの実験結果を図6に示す。評価車両位置に対して、歩行者ダミーをリモコンで横断開始させる。マニュアル操作ではあるが衝突設定の再現は安定した結果が得られた。本評価車両は、左折時横断歩行者対してもAEBは作動せず、センサの認識等の向上が望まれる結果であった。
AEB装着の評価車両が交差点を右折するタイミングで車両ダミーが直進してくるシナリオの実験結果を図5示す。この評価車両のAEBが作動しないことを評価した。また、両車の走行条件が制御されているため、5回程度のテストを行い再現性が良い結果を確認できた。
(2)交差点左折時横断歩行者AEB評価試験
評価車両が交差点を左折するタイミングで歩行者ダミーが横断してくるシナリオの実験結果を図6に示す。評価車両位置に対して、歩行者ダミーをリモコンで横断開始させる。マニュアル操作ではあるが衝突設定の再現は安定した結果が得られた。本評価車両は、左折時横断歩行者対してもAEBは作動せず、センサの認識等の向上が望まれる結果であった。
以上の様に安定した評価が可能であったが、歩行者ダミーの実験装置については、人為的な技量を要し手間がかかった。今後、自転車やバイクの行動模擬を含め、装置の自動化に期待したい点である。
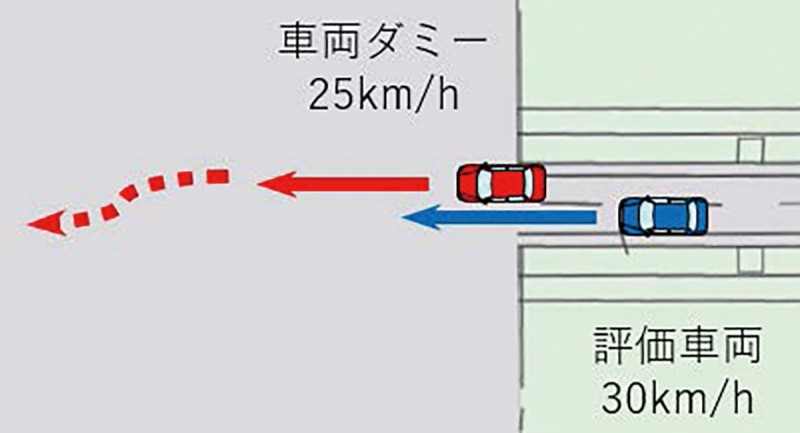
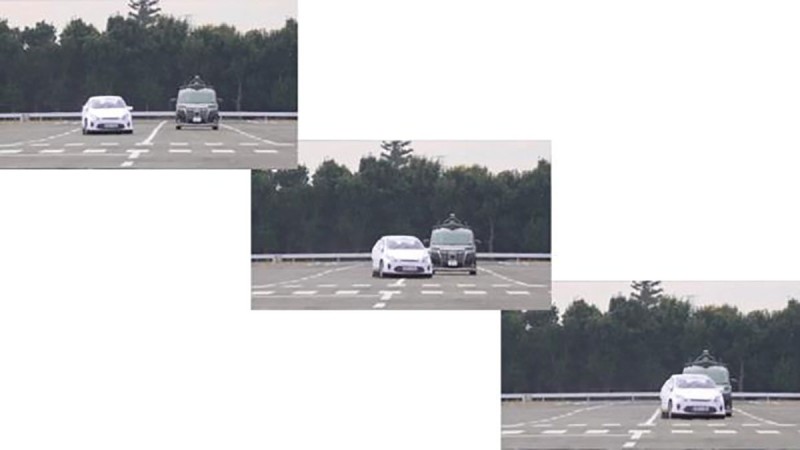
(3)カットイン時のALKS評価試験
初期レベル3の自動運転として、60km/h以下の自動車専用道路の渋滞時などを想定した自動運転システムALKSの安全性評価法規の制定が国際的に進展している。ALKSは自動「車線維持機能」であるが、この中には自動加減速機能も含まれる。近年NCAP等への評価法の制定が具体的になってきた。このシナリオ条件には、他車の割込み(カットイン)や、前方車両がレーンを抜け出した時に急に現れる渋滞車両への衝突回避(カットアウト)を見る安全性評価シナリオがある。今回、この内のカットインに対して実験を行い、ダミー車等の制御装置の有効性を確認した。実験条件を図7に示す。また、実験結果を図8に示す。ダミー車両は、評価車両の相対位置を制御しながら、前側方のスピードの遅いダミー車がやや無理に割り込んでくる状況を模擬している。20回程度の試験を行い大変再現性の良い実験結果であった。
(3)カットイン時のALKS評価試験
初期レベル3の自動運転として、60km/h以下の自動車専用道路の渋滞時などを想定した自動運転システムALKSの安全性評価法規の制定が国際的に進展している。ALKSは自動「車線維持機能」であるが、この中には自動加減速機能も含まれる。近年NCAP等への評価法の制定が具体的になってきた。このシナリオ条件には、他車の割込み(カットイン)や、前方車両がレーンを抜け出した時に急に現れる渋滞車両への衝突回避(カットアウト)を見る安全性評価シナリオがある。今回、この内のカットインに対して実験を行い、ダミー車等の制御装置の有効性を確認した。実験条件を図7に示す。また、実験結果を図8に示す。ダミー車両は、評価車両の相対位置を制御しながら、前側方のスピードの遅いダミー車がやや無理に割り込んでくる状況を模擬している。20回程度の試験を行い大変再現性の良い実験結果であった。
■ 結言
NCAPでの使用拡大が予想される本装置(ダミー車、評価車両用ステリング/ペダルロボット制御、ダミー歩行者)は、センサ検出のためのレーダ反射板や衝突しても再利用可能なウレタン組み合せ構造、台座プレートの自動走行制御等、様々な工夫がされており、大変有効な手段であることが確認できた。さらに実際のシナリオでの評価実験では、再現性の高い評価が可能であることも検証できた。今後、新たな安全シナリオの拡張にも取り組んでいく。

本研究では、最初はわからないことだらけでしたが、研究を進めていくうちに研究テーマへの理解が深まりました。また自動車に搭載されている安全装置を評価する際に普通では扱うことができない実験機材を使用することができたため、大変貴重な経験でした。