卒業研究のご紹介
2020年版
機械・自動車・ロボット系所属学生
校内自動走行領域の拡張及び走行軌道に関する一考察
近藤 丈洋神奈川県
創造工学部自動車システム開発工学科 2020年3月卒業
神奈川県立神奈川工業高等学校出身
研究の目的
日本の交通事故死者数が2019年には3,215人にまで減少したが、高齢者の死者数は全体の5割以上を占めており、減少幅が低下している傾向にあります。また、高齢化による運転能力の衰えに起因する事故回避が社会課題となっており、高齢者の安全の為の自動運転をはじめとする運転支援技術の開発が急務になっています。
本研究では、自動運転用ソフトウェア「Autoware」及び、その地図生成モジュール(NDT_mapping)を用いて、昨年までに作成した本学構内の領域に対して新たな走行領域を追加作成し走行。自動運転可能な範囲の拡張を行います。また、自動運転の検証に多用される高精度3次元地図を用いた、自動走行軌道との比較評価を目的としました。
本研究では、自動運転用ソフトウェア「Autoware」及び、その地図生成モジュール(NDT_mapping)を用いて、昨年までに作成した本学構内の領域に対して新たな走行領域を追加作成し走行。自動運転可能な範囲の拡張を行います。また、自動運転の検証に多用される高精度3次元地図を用いた、自動走行軌道との比較評価を目的としました。
研究内容や成果等
■ 自動運転用ソフトウェア「Autoware」
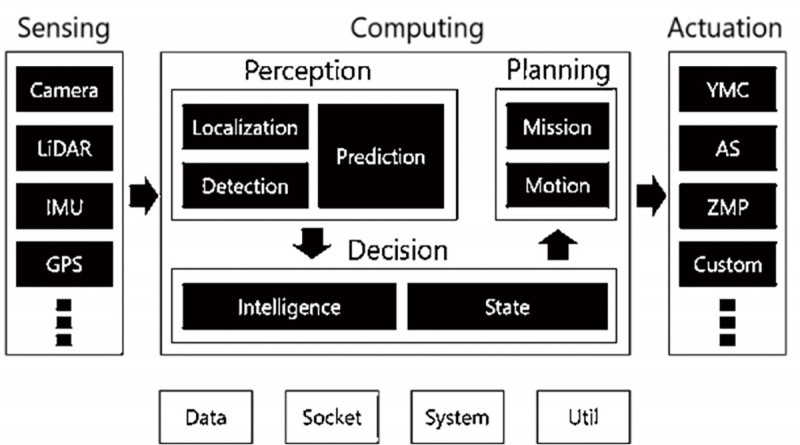
AutowareはLinuxとROS(Robot Operating System)をベースとした自動運転システム用オープンソースソフトウェアである。ROSはセンサやアクチュエータなど複数のモジュールと通信接続し、それらを1つのシステムとして使用できるよう設計されている。Autowareの全体像を図1に示す。Autowareには、自己位置推定や障害物検知、経路計画等自動運転に必要な機能が実装されている。
■ 高精度3次元地図
実走行の検証用地図として、アイサンテクノロジー提供の高精度3次元地図を使用する。高精度3次元地図はMobile Mapping System(MMS)と呼ばれる測量システムにより計測され、高精度・高密度な3次元点群と、信号や横断歩道といった一般道に存在する地物や路面表示などのベクター情報を抽出したADASマップから構成されている。
■ 実験車両とシステム構成
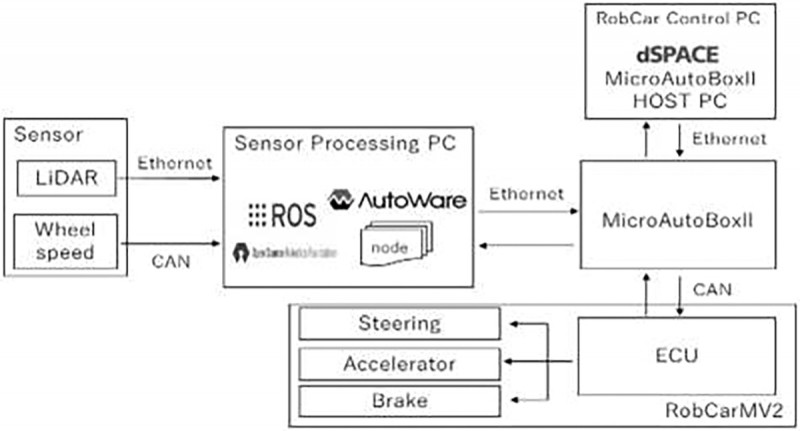
本システムは、AutowareとMicro Auto Box(dSPACE社)、実験車両にRoboCarMV2(以下、COMS)を使用している。実験車両外観を図2(略)に、実験車両のシステム構成を図3に示す。COMSに搭載されているLiDARと車輪速センサを使用し、Autowareの自己位置推定モジュール(NDT_matching)、地図作成モジュール、経路生成モジュール(waypoint_saver)を用い、地図及び目標経路を生成する。車両制御はシステムの耐障害性を考慮して、Micro Auto Box経由で行う。
■ 3次元地図作成と走行経路生成
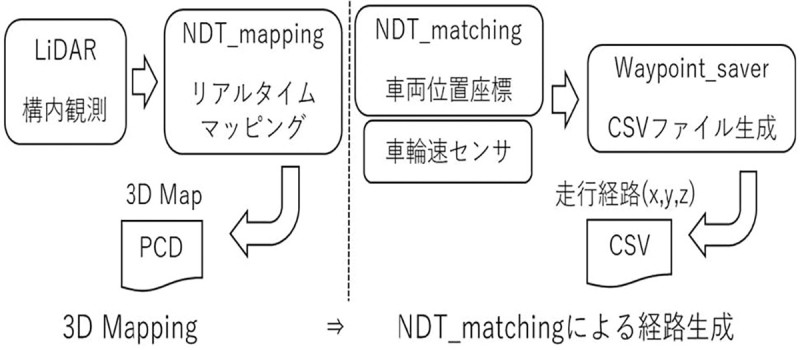
3次元地図は、LiDARのスキャンデータ及びNDT_mapping を用いて、リアルタイムで生成する。外界センシングと自己位置推定により得られた座標情報およびwaypoint_saverを用いて走行した軌跡を基に、走行経路を生成する(図4)。
■ 自動走行実験概要
生成した地図及び走行経路を用いて自動走行実験を行う。アクセルとブレーキは運転者自身が操作し、自動操舵制御による経路追従で構内を走行する。
■ 結果及び考察
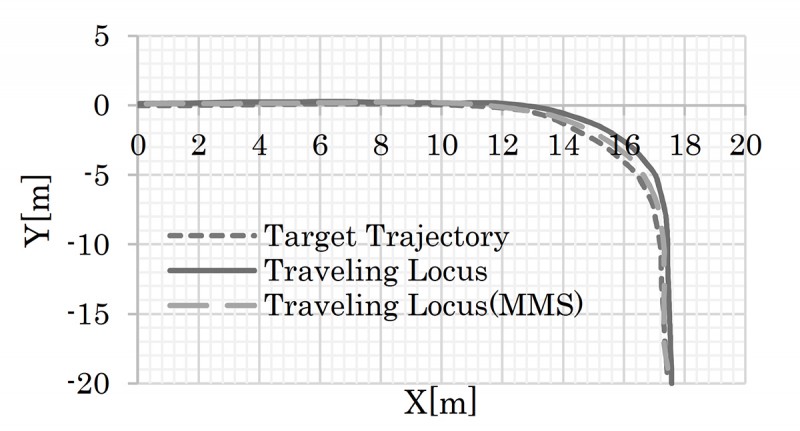
走行領域を拡張した地図を図5(枠内の範囲)に示す。拡張した領域内の走行実験によりスタート地点に帰還できることが確認できた。これにより神奈川工科大学構内8割の範囲が自動走行可能となった。図6は作成した地図を用いた走行軌跡の一部拡大である。目標軌跡と走行軌跡との逸脱幅が最大約0.9mであり、目標軌跡との差異が確認された。高精度3次元地図との比較の結果、地図の歪みを発見できた。軌跡差異の要因はスキャンマッチング中、地図の歪み部分をLiDARが誤認し、車両推定位置がずれたためと考えられる。また、地図作成中のCOMSの走行速度が、LiDARのスキャン速度に比して速かったため,歪みが 発生したと考えられる。これらの事から、歪みのない地図を作成するため、走行速度を LiDARのスキャン速度以下となるよう抑えて実車走行した。図7(略)に、歪み地点(図5)を拡大した遅れ補償有無の点群を示す。新たに作成した地図を用いた走行軌跡を図 8(略)に示す。目標軌跡に対して逸脱幅が最大約0.4mの自動走行が可能であり、走行車両の推定位置が向上したと考えられる。

■ 結言
本研究では、学内の自動走行領域を拡張することで、構内8割の範囲が自動走行可能となった。さらに、高精度3次元地図と比較し、生成地図データからの目標軌跡ズレを補正することで自動運転車両の追従性能、車両の位置推定が向上できる事が確認できた。
-
 指導教員からのコメント
自動運転・運転支援研究室教授 井上 秀雄
指導教員からのコメント
自動運転・運転支援研究室教授 井上 秀雄
- 自動車は、今や他の産業以上にIT,AI,FoTなどの情報・通信・エレクトロニクス技術の塊です。一方で、自動車工学の基礎を習得していないとこれらの技術を機能的に活かすことができません。このような点を、近藤君は本研究を通じて習得したと思います。最新のソフトウェア技術を習得し、実験車を自動運転として動かすことで、より実学の重要性を感じてくれたようです。念願の自動車会社に就職できたので、本研究など自動車システム開発工学科で学んだ経験を忘れずに頑張って下さい。今後の活躍に期待しています。
-
 卒業研究学生からの一言
近藤 丈洋
卒業研究学生からの一言
近藤 丈洋
- 本学の授業を通し、実物に触れることで、基礎知識や実体験を踏まえた考え方など多くのことを学べました。本研究では実験を通して、最先端の技術やシステムに触れ、それについて学ぶことができました。さらに卒業研究では、目的の重要性、実験方法の決め方や原因究明の重要さ等の問題解決力を身に付けられました。また、任意参加による海外研修でも最先端の自動車技術に接する機会があり、大変貴重な経験をしました。
- 創造工学部自動車システム開発工学科(大学サイト )
- 教員紹介ページ(大学サイト )
- 研究室ナビ(大学サイト)
