卒業研究のご紹介
2020年版
機械・自動車・ロボット系所属学生
仮想モビリティリサーチキャンパスの構築
薄井 龍司福島県
創造工学部自動車システム開発工学科 2020年3月卒業
石川高等学校出身
研究の目的
現代日本では、都市地域においては人口の集中による過密問題が発生している一方、逆に農山漁村地域では住民の減少により過疎問題が発生している。
その様な問題を解決するために我々の研究室では、自立行動ロボット研究に取り組んでいる。但し開発初期から実世界で実験を行うことは様々な問題がある。このため、ロボットの誤作動にすぐ対処でき、研究に理解が得られやすい大学キャンパス内で自立行動ロボットを走行させ、実用化を目指すことが計画されている。
これを受け今回、大学のキャンパス内を模した仮想世界を作成した。仮想世界内に、新型モビリティを実装し歩行者と並びながら走行させたり、数種類のモビリティを同時に走行させるなど、様々な状況を想定しながらシミュレートすることで、現実に起こる課題を事前に発見し、対策することを狙いとする。
その様な問題を解決するために我々の研究室では、自立行動ロボット研究に取り組んでいる。但し開発初期から実世界で実験を行うことは様々な問題がある。このため、ロボットの誤作動にすぐ対処でき、研究に理解が得られやすい大学キャンパス内で自立行動ロボットを走行させ、実用化を目指すことが計画されている。
これを受け今回、大学のキャンパス内を模した仮想世界を作成した。仮想世界内に、新型モビリティを実装し歩行者と並びながら走行させたり、数種類のモビリティを同時に走行させるなど、様々な状況を想定しながらシミュレートすることで、現実に起こる課題を事前に発見し、対策することを狙いとする。
研究内容や成果等
■ 方法
本研究では、交通流シミュレータPTV Vissimと歩行者シミュレータPTV Viswalkを使用しキャンパスの再現を行った。PTV VissimとPTV Viswalkはミクロ交通シミュレーションソフトウェアである。
(1)歩行者流の再現
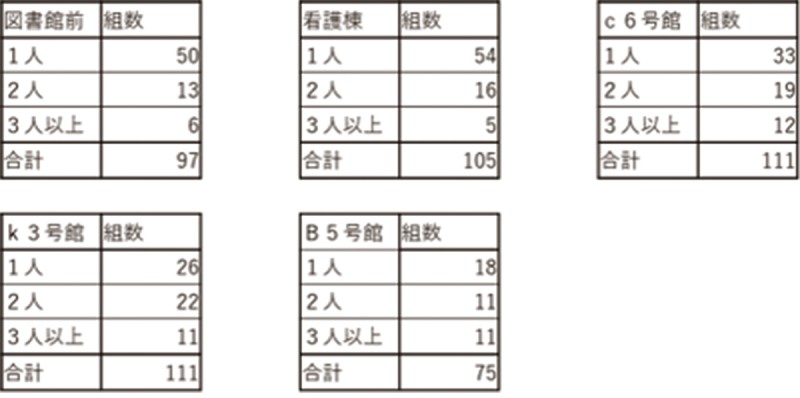
まず歩行者流の再現をするにあたり、キャンパス内が昼休みの時間に特に人通りの多い5カ所で、10分おきの人の交通量、何人組で歩いているかを測定した。その中で、最も交通量の多い時間帯をシミュレーションの基礎データとした(Table.1)。また後藤の研究(文献略)に基づいて、キャンパス内の歩行者の歩行速度を設定した。
(1)歩行者流の再現
まず歩行者流の再現をするにあたり、キャンパス内が昼休みの時間に特に人通りの多い5カ所で、10分おきの人の交通量、何人組で歩いているかを測定した。その中で、最も交通量の多い時間帯をシミュレーションの基礎データとした(Table.1)。また後藤の研究(文献略)に基づいて、キャンパス内の歩行者の歩行速度を設定した。
(2)建物とロボットの再現
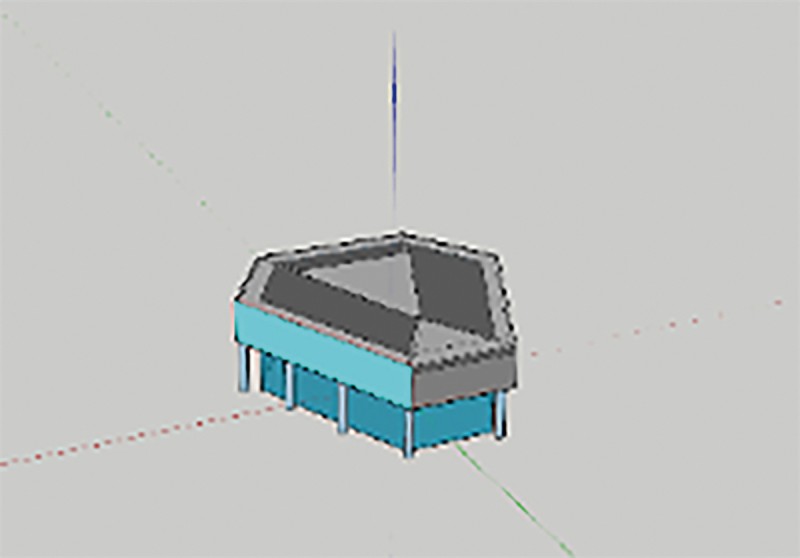
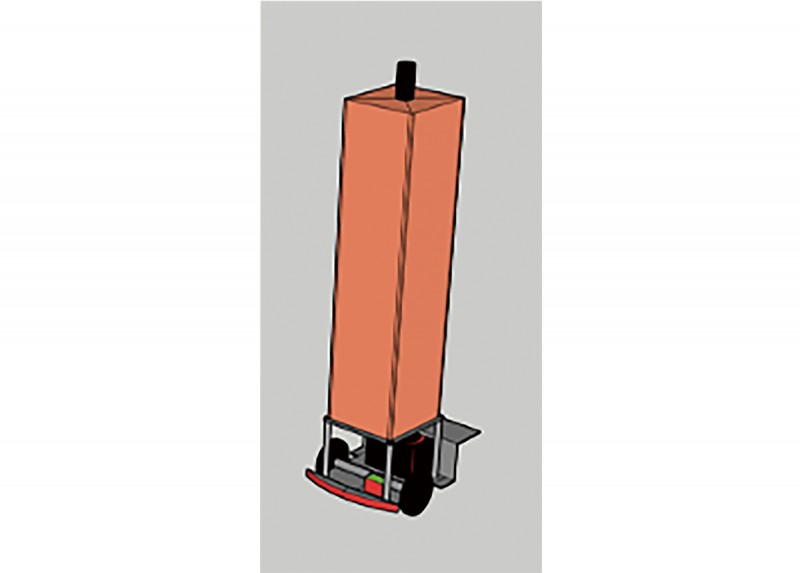
キャンパス内の建物及びロボットの3Dモデルを再現するため、3次元モデリング・ソフトウェアのSketchupを使用した。このソフトを使い今回は主として使われる建物と、ロボットの3Dモデルを作成した。対象とした建物・ロボットと作成した3Dモデルの一例を図に示す(Fig.1〜4)。
キャンパス内の建物及びロボットの3Dモデルを再現するため、3次元モデリング・ソフトウェアのSketchupを使用した。このソフトを使い今回は主として使われる建物と、ロボットの3Dモデルを作成した。対象とした建物・ロボットと作成した3Dモデルの一例を図に示す(Fig.1〜4)。


■ 結果
(1)学内の再現
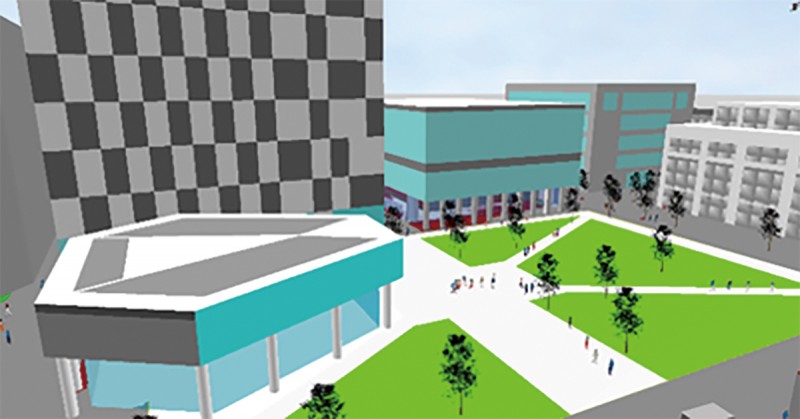
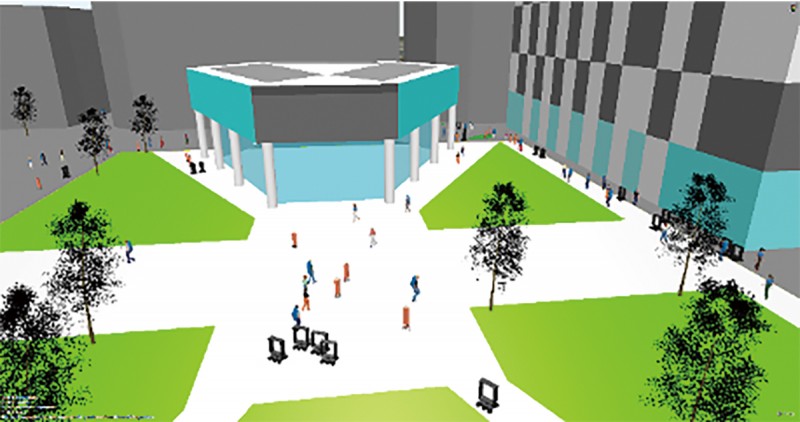
以下の図(Fig.5)のように、キャンパス内の昼休みの状況を模した仮想世界を作成することができた。
以下の図(Fig.5)のように、キャンパス内の昼休みの状況を模した仮想世界を作成することができた。
(2)歩行者の再現
計測した昼休みの歩行者交通量を基に、歩行者のOD(origin-destination)データを作成し、交通流の再現を試みた。その結果、実測した断面交通流を再現することができた(Table.2)。
計測した昼休みの歩行者交通量を基に、歩行者のOD(origin-destination)データを作成し、交通流の再現を試みた。その結果、実測した断面交通流を再現することができた(Table.2)。

(3)ロボットを追加した歩行者の流れ
Fig.5で作成した歩行者の交通に、ロボットを追加して走行させることができた。さらに、ロボットの量を大幅に増やした時、歩行者が渋滞したり、回り道をする様子が観測できた。
Fig.5で作成した歩行者の交通に、ロボットを追加して走行させることができた。さらに、ロボットの量を大幅に増やした時、歩行者が渋滞したり、回り道をする様子が観測できた。
■ 考察
今回はキャンパス内ということで簡単に人の動きや速度交通流調査を行うことができたが、実際にこれが過疎地域などの現実世界で行う場合は経費や時間がかかる。こういった調査の経費削減などを行うにはどうしたらよいのか、考える必要性がある。
■ 応用
今回の研究は,現実に起こる問題の事前検討だけではなく、以下のような応用が考えられる。
①共同研究先や関係各所への研究構想の説明
②5Gの到来によるデジタルツイン技術を用いたより良いサービスの提供
③仮想世界で自習したAIが運転する自立走行車の開発
①共同研究先や関係各所への研究構想の説明
②5Gの到来によるデジタルツイン技術を用いたより良いサービスの提供
③仮想世界で自習したAIが運転する自立走行車の開発
■ 結論
今回、交通流シミュレータのPTV Vissim、及びPTV Viswalkを使い大学のキャンパス内の交通流を再現することにより、歩行者と自立走行ロボットを両立して走らせることができた。これにより、現実に実験を行う前に問題を発見することが可能となった。なお、本シミュレーションは共同研究先や関係各所への構想説明に頻繁に用いられ、計画の理解に多大な貢献をもたらすことができた。この研究により、目的で述べた過疎地域での自立走行ロボットの実用化を目指す大きな1歩になり、過疎地域の問題解決に近づいたと考えられる。
-
 指導教員からのコメント
ヒューマンインタフェイス研究室教授 脇田 敏裕
指導教員からのコメント
ヒューマンインタフェイス研究室教授 脇田 敏裕
- この研究は、「モビリティリサーチキャンパス」という新たな構想を、企画段階で評価し、多くの方に理解いただく目的で行いました。薄井君はPCに詳しいという強みを生かして、自ら高性能PCを組みたて、交通流シミュレータを使ってコンピュータの中に未来のキャンパス像を構築しました。得られたシミュレーションの威力は絶大で、新たな産学連携が結ばれ、また、大学全体の新企画として「大学総合案内2021」に掲載されるという効果を生みました。新年度はこの構想を着実に具体化していく予定です。
-
 卒業研究学生からの一言
薄井 龍司
卒業研究学生からの一言
薄井 龍司
- 私は本学での4年間を振り返ると、まず初めに学習の面で感じたことは基本から丁寧に教えてくれる所です。私は高校で物理などを学んでいなかったのですが、そういった人でもついていけるような講義のクラス分けや、キャリアセンターなどの講義以外での勉強の環境作りがしっかりされていてとても良かったです。また研究の面では、3年間学んできた自動車の専門的な知識を生かし、最先端な技術の研究に携わることにより、今後社会に出ても通用するような人間に成長することができました。
- 創造工学部自動車システム開発工学科(大学サイト )
- 教員紹介ページ(大学サイト )
- 研究室ナビ(大学サイト)
