卒業研究のご紹介
2021年版
機械・自動車・ロボット系所属学生
共同消費者視点からの自動運転/運転支援の定量評価法に関する研究
富田 一輝(代表者)東京都
創造工学部自動車システム開発工学科
2021年3月卒業
2021年3月卒業
東京都 日本工業大学 駒場高等学校出身
井上 哲東京都
創造工学部自動車システム開発工学科
2021年3月卒業
2021年3月卒業
東京都立総合工科高等学校出身
研究の目的
市販車に搭載されている自動運転及び運転支援システムの消費者視点からの安全性、安心感に関する評価方法と定量評価指標を確立し、今後の自動運転制御システムの設計目標に反映していくことを目的とした。
研究内容や成果等
■ ADAS/AD 評価の考え方
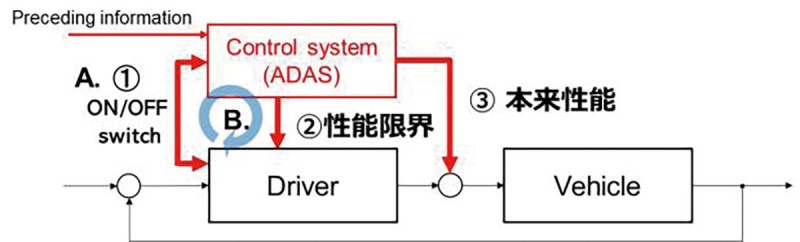
今回、高速道路での通常走行におけるコーストレース等の自動化性能評価を対象とした。自動運転の国際基準法規で議論されている運行設計領域ODD(Operational Design Domain)にも示されているように自動化システムには限界があり、正常に機能する走行条件を規定しようとする動きがある。本研究では、この本来性能に加え、消費者視点を考慮し、性能限界でのドライバへの受渡し/スイッチ操作/オーバーライド時等の人間〜機械運転の遷移状態の安心感にも評価対象を拡張した(図1)。
■ 実験・評価方法
(1)実験車両、パネラ、評価コース
昨年までの評価項目を整理し、全49項目に亘る評価用シートを作成した(5段階評価)。
・独車2台(A、B)、米国車1台(C)、日本車2台(D、E)。
・熟練ドライバ3名(a、b、c)、初心者ドライバ2名(d、e)。
・圏央厚木インタ-大井松田インタ間(一部JARIテストコースで計測)。
(2)評価項目と評価用シートの作成昨年までの評価項目を整理し、全49項目に亘る評価用シートを作成した(5段階評価)。
①SW操作などの運転負荷/安全性
・主観評価、SW操作ミス頻度(操作仕事率/量)
②遷移状態の安心感/わかり易さ
・前方注視点状況データ、インジケータ確認頻度
③本来性能,性能限界
・コース維持性能(カメラ白線認識での横変動量)
・オーバーライド時の車両挙動と安心感(操舵トルクと横変位量,操舵角等)
・LDP(Lane Deperture Prevention)の収束軌跡
・コーナートレース維持性能の限界の見極め
等、主観〜客観評価の流れを確立した。

■ 実験結果及び考察
(1)カメラ画像認識による横変位計測方法の確立
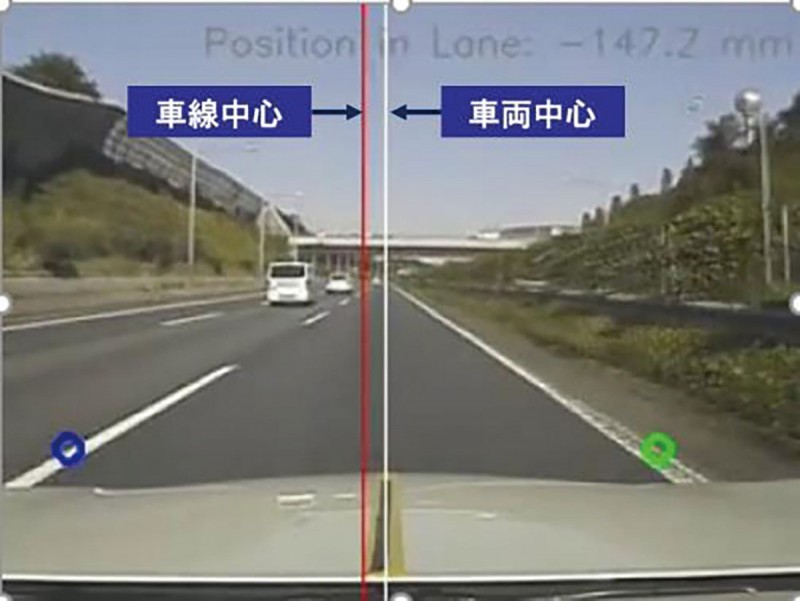
近距離の白線認識と車両フードの中心目印との差により車線内の横変位量の計測を可能にできた(市販カメラ使用,自前作成白線認識ソフトウェア)。
近距離の白線認識と車両フードの中心目印との差により車線内の横変位量の計測を可能にできた(市販カメラ使用,自前作成白線認識ソフトウェア)。
(2)コース維持の安定性
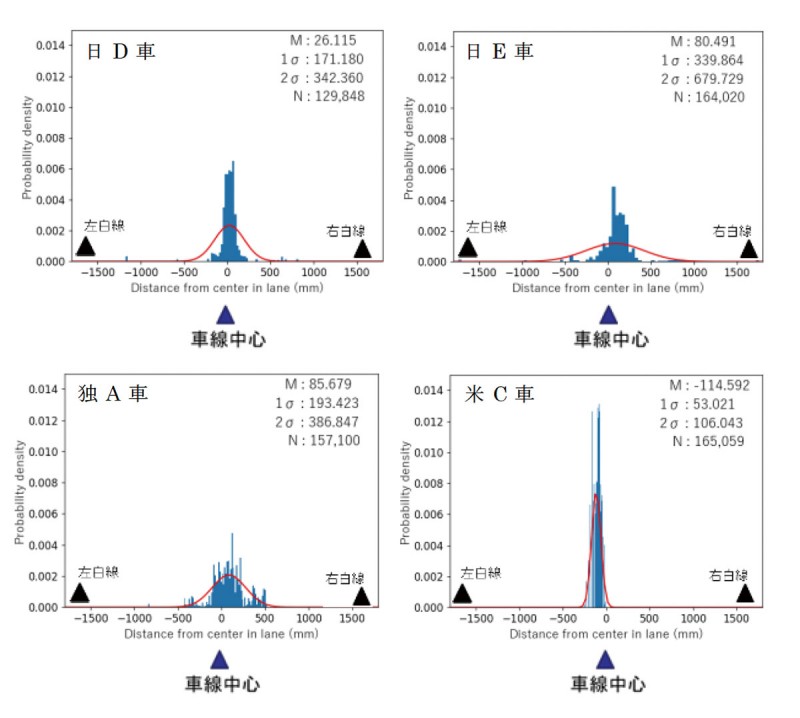
ショートコース(伊勢原JC〜厚木IC)における、走行中の車線内位置(横軸)を頻度(縦軸)で示したものを図4に示す。日D車の標準偏差(1σ)が約17cmであるのに対し、日E車の標準偏差が倍の約34cmもあり、主観評価の不安定な結果とよく合っている。また、E車はコース維持性能でも主観評価は不満足であり、不満の挙がっていない独A車や日D車の標準偏差を指標とすると、定量的に標準偏差20cm程度に収まる安定性を目指す必要がある。また、米C車の標準偏差は約5cmと他車両に比べて突出して小さいものの、やや中心より左に寄っている。主観評価コメントは「C車は自動運転の制御性は高いがやや左に寄り怖い」とあった。これもデータによく表れているが、ドライバの安心感は、自動走行の制御性だけでは決まらないとも言える。
ショートコース(伊勢原JC〜厚木IC)における、走行中の車線内位置(横軸)を頻度(縦軸)で示したものを図4に示す。日D車の標準偏差(1σ)が約17cmであるのに対し、日E車の標準偏差が倍の約34cmもあり、主観評価の不安定な結果とよく合っている。また、E車はコース維持性能でも主観評価は不満足であり、不満の挙がっていない独A車や日D車の標準偏差を指標とすると、定量的に標準偏差20cm程度に収まる安定性を目指す必要がある。また、米C車の標準偏差は約5cmと他車両に比べて突出して小さいものの、やや中心より左に寄っている。主観評価コメントは「C車は自動運転の制御性は高いがやや左に寄り怖い」とあった。これもデータによく表れているが、ドライバの安心感は、自動走行の制御性だけでは決まらないとも言える。
(3)オーバーライド時の車両挙動と安心感
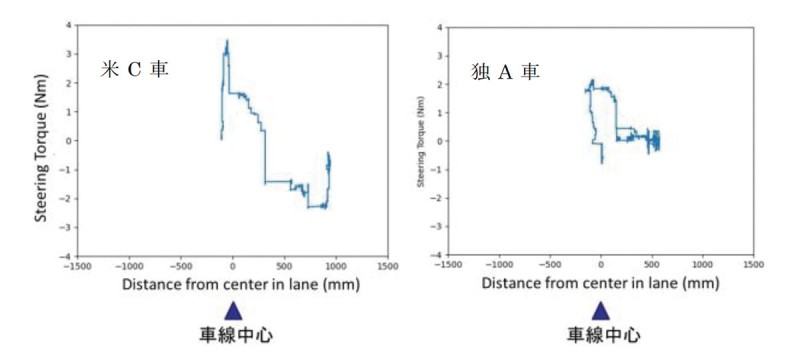
コーストレース制御中に、ドライバが操舵介入しようとした時の安心感を、操舵トルクと車線内の横変位量で表現した結果を図5に示す。米C車はオーバライドトルクが約3Nm と大きく、その後即時制御解除後となり、変動トルク、横変位量共に大きく変動する。これに対し、独A車はオーバライドトルクが約2Nmで適切でその後の操舵トルクも徐々に変化し横変位量共に小さい。これは主観評価で各パネラが共通で指摘したC車の不安感、A 車のスムーズなオーバーライドの安心感の意見と一致している。C車とA車は、非常に対照的な性能設計をしており、コース維持の安定性のコメントからも、A車は、黒子的な自動運転技術として人間の操縦意志を連続的に受け入れているが、C車は、人間〜機械の関係をON/OFF的に捉えている。今回の評価からは「A車が一番、安心感がある」結果であったこともこの様な設計思想を実現している点にあると想定される。
コーストレース制御中に、ドライバが操舵介入しようとした時の安心感を、操舵トルクと車線内の横変位量で表現した結果を図5に示す。米C車はオーバライドトルクが約3Nm と大きく、その後即時制御解除後となり、変動トルク、横変位量共に大きく変動する。これに対し、独A車はオーバライドトルクが約2Nmで適切でその後の操舵トルクも徐々に変化し横変位量共に小さい。これは主観評価で各パネラが共通で指摘したC車の不安感、A 車のスムーズなオーバーライドの安心感の意見と一致している。C車とA車は、非常に対照的な性能設計をしており、コース維持の安定性のコメントからも、A車は、黒子的な自動運転技術として人間の操縦意志を連続的に受け入れているが、C車は、人間〜機械の関係をON/OFF的に捉えている。今回の評価からは「A車が一番、安心感がある」結果であったこともこの様な設計思想を実現している点にあると想定される。
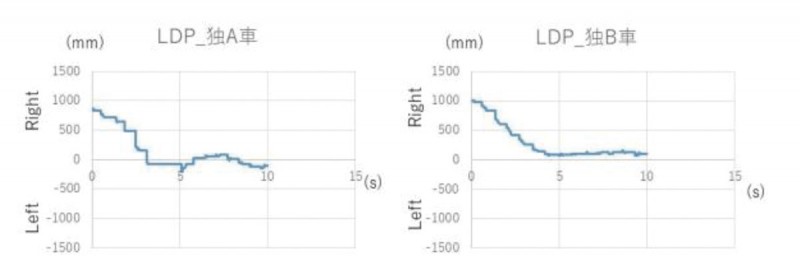
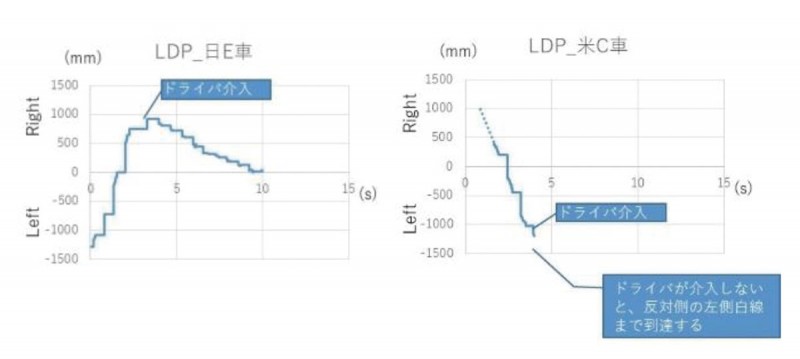
(4) LDPの収束性
図6、7にLDPの収束性を示す。0 点は白線に差し掛かりLDPが作動した状態を示している。独A、B車は、安定的に車線中央に収束するが、C、E車は、図7に示すように戻すだけで、車線中央に収束せず反対側白線までいくことがある。これもデータによく示されている。この原因は、車載カメラ等の車線認識能力のロバスト性不足によることが考えられる。
図6、7にLDPの収束性を示す。0 点は白線に差し掛かりLDPが作動した状態を示している。独A、B車は、安定的に車線中央に収束するが、C、E車は、図7に示すように戻すだけで、車線中央に収束せず反対側白線までいくことがある。これもデータによく示されている。この原因は、車載カメラ等の車線認識能力のロバスト性不足によることが考えられる。
■ 結言
本研究では、ADAS/ADの消費者視点からの安全性、安心感に関する評価方法を49の評価項目としてまとめた。さらに、画像認識と車両挙動を併せた計測技術により、人間〜機械運転の遷移領域における安心感を定量評価指標で示すことができた。今後、これらの定量評価指標を制御設計目標に反映していく。
-
 指導教員からのコメント
自動運転・運転支援研究室教授 井上 秀雄
指導教員からのコメント
自動運転・運転支援研究室教授 井上 秀雄
- 本研究は、実用化が進んでいる運転支援・自動運転システムが、一般の消費者の視点から本当に嬉しく安全なものになっているか検証するためにリアルワールドでの評価手法の確立を目指したものです。約60項目に亘る主観評価項目を標準化するとともに、機械運転と人間運転が受け渡しする遷移状態に注目しドライバが安心できるかの点で、各市販車の性能を定量値で示すことができた画期的なものです。業界でも、本研究が注目されモーターファンイラストレーテッド誌で大きな記事として取り上げられるなど、最先端の評価法を示唆することができました。2人共、自信をつけて社会に巣立ったと思います。
-
 卒業研究学生からの一言
富田 一輝
卒業研究学生からの一言
富田 一輝
- 自動運転はただ決められた道を自動で走っているだけでは乗っている人は安心感を得ることができず、ドライバの負担を軽減するという本来の目的を果たすことはできないということが分かった。大切なのはあくまで人間が主体となり、車はその支援をするということがこの研究を通して分かった。
- 創造工学部自動車システム開発工学科(大学サイト )
- 教員紹介ページ(大学サイト )
- 研究室ナビ(大学サイト)
