卒業研究のご紹介
2020年版
機械・自動車・ロボット系所属学生
競技車両におけるG-Vectoring制御の有効性に関する研究
大津 俊太朗神奈川県
大学院機械システム工学専攻 博士前期課程1年
(創造工学部自動車システム開発工学科 2020年3月卒業)
(創造工学部自動車システム開発工学科 2020年3月卒業)
神奈川県立神奈川総合産業高等学校出身
研究の目的
車両のステアリング操作に連係し加減速制御を行うG-Vectoring制御は量産車において、乗員の疲労軽減や操縦安定性向上等において高い評価を受けていることから、この制御を競技車両に用いることで操縦安定性向上等によりラップタイム向上を期待する。
本研究では、学生フォーミュラEVの車両を、ラップタイム、ペダルワーク、コーナーワークの3つの観点から、評価を行い、G-Vectoring制御は競技車両において有効性を確認する。上記の3つの観点は、ラップタイムは競技においての実質的効果の指標となり、ペダルワークはエネルギー効率や今後検討している回生ブレーキの検討材料へとつながり、コーナーワークはドライバーの操作量の変化という観点から、ドライバーの負担軽減の指標となると考えている。
本研究では、学生フォーミュラEVの車両を、ラップタイム、ペダルワーク、コーナーワークの3つの観点から、評価を行い、G-Vectoring制御は競技車両において有効性を確認する。上記の3つの観点は、ラップタイムは競技においての実質的効果の指標となり、ペダルワークはエネルギー効率や今後検討している回生ブレーキの検討材料へとつながり、コーナーワークはドライバーの操作量の変化という観点から、ドライバーの負担軽減の指標となると考えている。
研究内容や成果等
■ G-Vectoring制御
本研究で使用するG-Vectoring制御の制御式は量産車と同じ制御式を使用する。Gxは制御する前後加速度を表し、Gy.は横加速度を表す。Cxyは制御ゲインである。
旋回時のステアリング操作に連係してエンジンブレーキを作用させて、後輪の前後力を用いて加減速を行う。制御により、エキスパートドライバのような理想とする操舵に連係した加減速制御を可能と している。
制御式を以下に示す。
旋回時のステアリング操作に連係してエンジンブレーキを作用させて、後輪の前後力を用いて加減速を行う。制御により、エキスパートドライバのような理想とする操舵に連係した加減速制御を可能と している。
制御式を以下に示す。

(1)式より、旋回開始時に減速、終了時に加速を行う。
■ ドライビングシミュレータ
ドライバー操作情報をドライビングシミュレータ(以下DS)内に取り組み運動方程式で構成された車両モデルで計算を行う。上記(1)式に基づいた計算をすることで車両前後方向の加速指令Gxに基づいた運動を再現する。
■ 走行実験
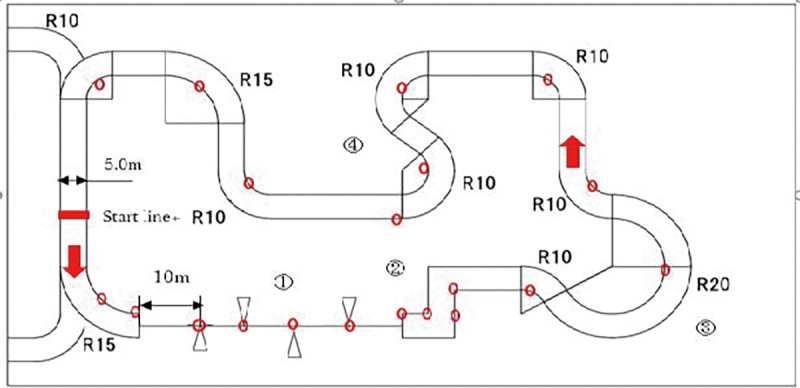
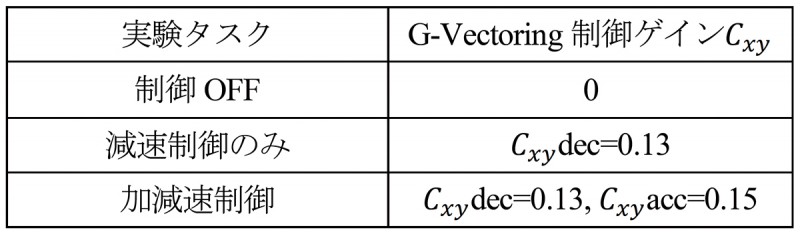
G-Vectoring制御の効果によるラップタイム、ペダルワーク、コーナーワークの変化をみるために、DS内に構築したテストコースを走行した。テストコースをFig.1に示す。Fig.1の①、②、③、④はそれぞれ、スラローム、シケイン、複合コーナー、S字コーナーを示す。また、実験は制御OFF、減速のみ、加減速制御の3種類の実験を行った。実験タスクごとに設定した制御ゲインをTable.1に示す。
■ 実験結果
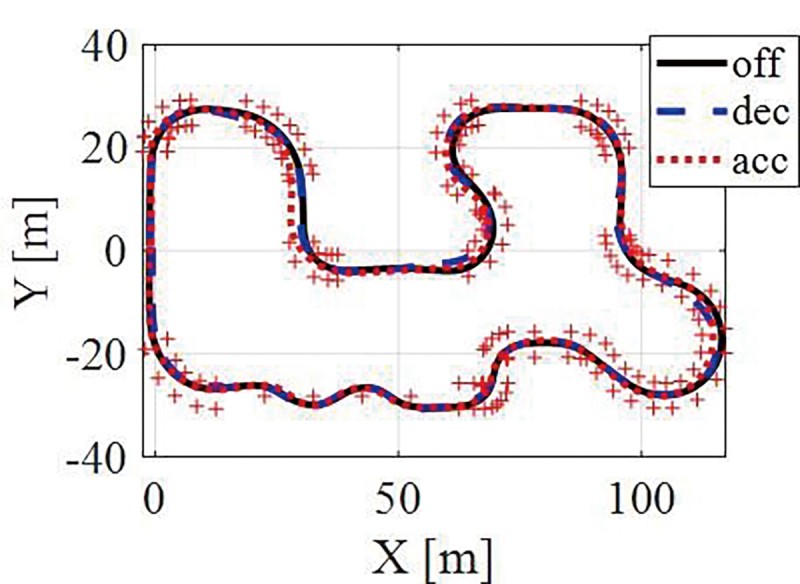
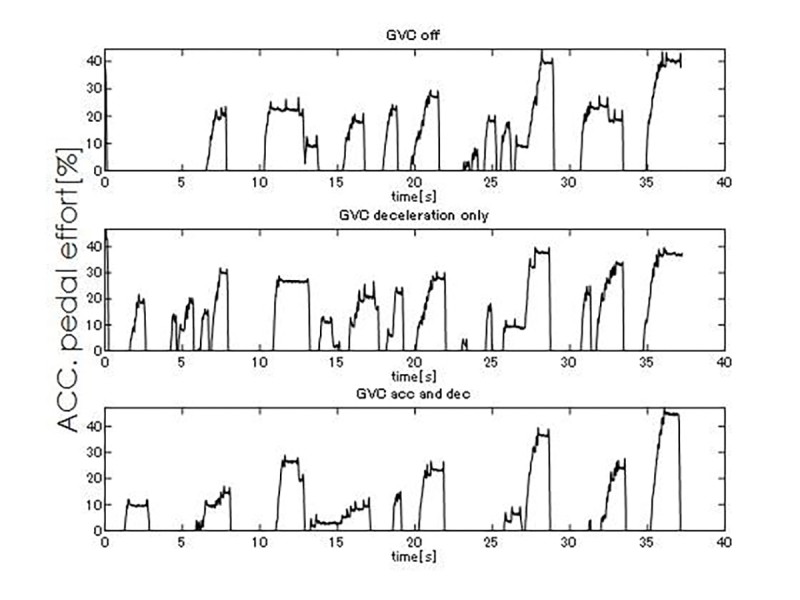
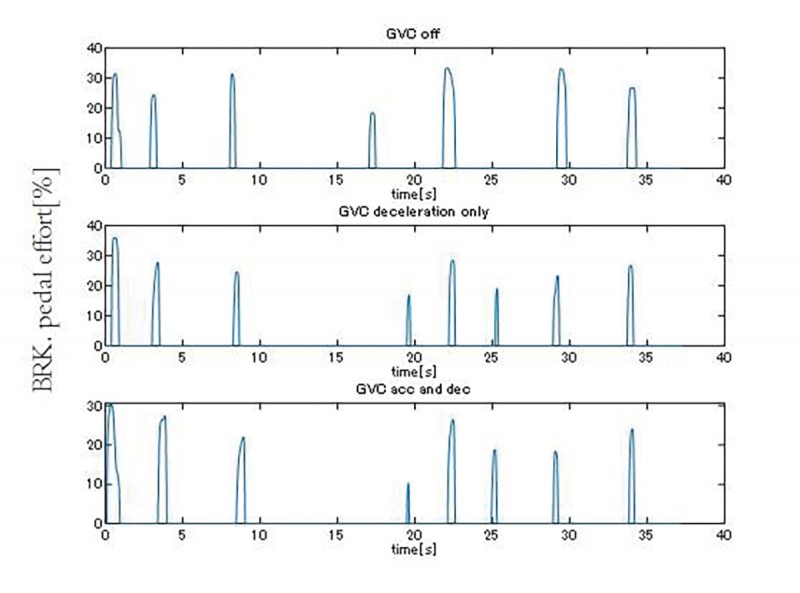
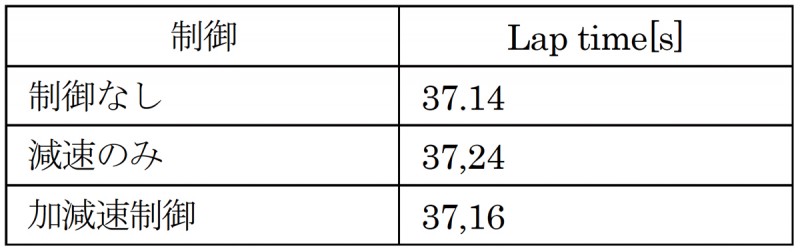
各実験タスクにおけるコース走行時の最速ラップの走行軌跡をFig.2 に示す。Fig.3、Fig.4は、上から制御 off、減速のみ、加減速制御のアクセル開度及びブレーキ開度を示す。Table.2に各制御のラップタイムを示す。
■ 考察
ラップタイムでは0.1秒の差でしか現れなかったが、ペダルワークで顕著な差がみられた。Fig4、Fig.5のアクセル、ブレーキ開度の波形から、3段目の加減速制御でアクセルは踏む回数に変化は少ないが、開度が各コーナーで減っていることがわかる。
■ 結言
タイム差での比較では、各制御で差がわずかであったが制御OFFの方がタイムは速い結果となったが、コーナーワークでは、各制御で主にペダルワークに差が出ていたことが確認できた。
(1)S字コーナーや複合コーナーでは、G-Vectoring制御の効果により、ペダルワークにおいてブレーキの使用率とアクセル開度が減っていることが確認できた。ペダル操作が減ったことによって車速の低下は大きく影響していないため、ドライバの運転の操作量を減らし負担を軽減できる。
(2)シケインの部分では、シケインコーナーの本来の目的である大きな減速を要するコーナーとしての再現性が本テストコースでは得られていない。だが、本テストコースのシケインでは、制御OFF、加減速制御でペダルワークや操舵、通過時間で差が少ないため、フォーミュラ車両の特性を理解し、カートの運転に慣れているドライバには制御は必要ないと考えられる。
(3)スラロームでも、結果はシケインと同じ結果となったため、一概にG-Vectoring制御がスラロームシケインの2点において、結果としては有効性は確認できなかった。上記より、競技車両においてG-Vectoring制御は、ドライバのペダルワークに影響していることが分かった。また、コーナーワークにおいては、一部のコーナーでは制御の効果が少ないコーナーが存在するが、コーナーによって可変制御を行うことでさらに効果を高められる可能性があることが確認できた。よって、競技車両においてG-Vectoring制御は加減速制御が有効であるが、制御ゲインを一定で行うと一部のコーナーでは期待する効果が得られなかった。
(1)S字コーナーや複合コーナーでは、G-Vectoring制御の効果により、ペダルワークにおいてブレーキの使用率とアクセル開度が減っていることが確認できた。ペダル操作が減ったことによって車速の低下は大きく影響していないため、ドライバの運転の操作量を減らし負担を軽減できる。
(2)シケインの部分では、シケインコーナーの本来の目的である大きな減速を要するコーナーとしての再現性が本テストコースでは得られていない。だが、本テストコースのシケインでは、制御OFF、加減速制御でペダルワークや操舵、通過時間で差が少ないため、フォーミュラ車両の特性を理解し、カートの運転に慣れているドライバには制御は必要ないと考えられる。
(3)スラロームでも、結果はシケインと同じ結果となったため、一概にG-Vectoring制御がスラロームシケインの2点において、結果としては有効性は確認できなかった。上記より、競技車両においてG-Vectoring制御は、ドライバのペダルワークに影響していることが分かった。また、コーナーワークにおいては、一部のコーナーでは制御の効果が少ないコーナーが存在するが、コーナーによって可変制御を行うことでさらに効果を高められる可能性があることが確認できた。よって、競技車両においてG-Vectoring制御は加減速制御が有効であるが、制御ゲインを一定で行うと一部のコーナーでは期待する効果が得られなかった。
-
 指導教員からのコメント
車両運動・制御研究室教授 山門 誠
指導教員からのコメント
車両運動・制御研究室教授 山門 誠
- G-Vectoring制御は、本学で生まれて、マツダ株式会社の車両に広く採用されている技術です。微妙な車体姿勢が乗り心地や疲労感の低減につながることが報告されています。しかしながら今回の研究のように高い前後加速度、横加速度が加わるような限界走行をした場合にはどのような効果があるのかは、明確になっていませんでした。今回の大津君の研究において、全てが解明されたわけではありませんが、G-Vectoring制御の限界走行に対する効果ポテンシャルが確認できたことは、大きな成果であると考えられます。今後は、実車での確認、実践への投入など、これからの発展が大いに期待できる研究です。
-
 修士研究学生からの一言
大津 俊太朗
修士研究学生からの一言
大津 俊太朗
- 私が一番成長を実感できたことは、学生フォーミュラです。主に成長を実感できたエピソードとして、学生フォーミュラで車検に合格したことです。検査員の人は大手自動車メーカーに勤めている現役のエンジニアの方でしたが、その方たちにチームで設計した車両を私自身の言葉で説明し、問題点を指摘されれば修理をした後、修理箇所が車検に適合されるかを論理的に説明し合格できた時、自分が今まで大学で車両設計や力学など学んできたことの集大成のように感じ、達成して自分の成長を実感できました。
- 創造工学部自動車システム開発工学科(大学サイト )
- 教員紹介ページ(大学サイト )
- 研究室ナビ(大学サイト)
