卒業研究のご紹介
2020年版
機械・自動車・ロボット系所属学生
Tele Operating Systemに関する研究
木部 克哉神奈川県
大学院機械システム工学専攻 博士前期課程 2020年3月修了
(創造工学部自動車システム開発工学科 2018年3月卒業)
(創造工学部自動車システム開発工学科 2018年3月卒業)
横須賀市立横須賀総合高等学校出身
研究の目的
ドライバ操作を代替する自律・自動運転システムの実現を見据えた研究開発が盛んに行われているが、幅広い環境で安全走行する信頼性確保には課題がある。国内における一般道での公道試験は、地域限定、かつ、低速で行われているが、更に安全性確保の手段として遠隔監視とTele Operating System(遠隔運転)が用いられることがある。Tele Operating Systemは、通信を利用して遠隔から人間が判断しながら車両を運転する支援システムとして、いくつかの研究が進められている。これまでのTele Operating Systemの研究では、通信遅れによる操縦性の悪化やセキュリティの課題が指摘されている。そこで、本研究では通信遅れが ある中でも、遠隔での操縦性を向上させる技術を開発し、Tele Operating Systemの可能性を見極めることを目的とした。研究では、遠隔運転席に表示する映像の中に、遅れ時間を補償するための前方注視点を重畳させる仮想シミュレーション環境を構築し、その効果を検証した。更に、実車にこの環境を実装し効果検証を行った。
研究内容や成果等
■ 構築したTele Operating System の概要
(1)実車でのシステム構成
本システムは小型 EV(ZMP RoboCar MV2)を制御対象車両(図1左)とし、遠隔地に設置した運転席(図1右)にて人間が運転するものである。遠隔地にいる運転者は、車両前方のカメラ映像を見ながら実車に近い形でハンドル、アクセル、ブレーキの指令が出せる環境を構築した。また、通信方法としては、高速で通信が可能な通常Wi-Fiを採用した。車載センサとして、カメラ以外にLidarも搭載しているが、これは実験中の自車位置を推定するために利用している。先にも挙げた様にTele Operating Systemは、通信遅れ時間が,操縦性の悪化に繋がることが示されている。本システムの通信遅れを計測した結果、約0.4秒発生していることが判明し、その時間が運転に対しどの程度悪影響をもたらすのか、予備実験にて確認を行った。
本システムは小型 EV(ZMP RoboCar MV2)を制御対象車両(図1左)とし、遠隔地に設置した運転席(図1右)にて人間が運転するものである。遠隔地にいる運転者は、車両前方のカメラ映像を見ながら実車に近い形でハンドル、アクセル、ブレーキの指令が出せる環境を構築した。また、通信方法としては、高速で通信が可能な通常Wi-Fiを採用した。車載センサとして、カメラ以外にLidarも搭載しているが、これは実験中の自車位置を推定するために利用している。先にも挙げた様にTele Operating Systemは、通信遅れ時間が,操縦性の悪化に繋がることが示されている。本システムの通信遅れを計測した結果、約0.4秒発生していることが判明し、その時間が運転に対しどの程度悪影響をもたらすのか、予備実験にて確認を行った。

(2)実験コース
本研究では、連続的な操舵が必要となるパイロンスラロームを実験コースとし、操縦性の基本的な観点を評価した。小型EVを用いた実車実験では、パイロンの間隔は10mとし、最初の直線区間は助走のために16mとした。車速10km/h、15km/h、20km/hの3パターンを、1人のドライバにつき、各条件それぞれ 3回ずつ走行した。走行コースを図3(略)に示す。
(3)予備実験による課題の抽出
被験者には実験コースを毎回同じ軌跡を走行するよう指示し車両を運転してもらった。実際に被験者が運転した結果を図 4(略)に、又、遠隔運転した結果を図5(略)に示す。
その結果、実車両で運転した軌跡が3パターンとも安定しているのに対し、遠隔運転した軌跡はスラローム後半でばらつきが大きくなり、20km/hではコース最後まで運転できなかった。この様に約 0.4秒の通信遅れの操縦性悪化レベルが確認できた。
(4)通信遅れの補償方法の考え方
人間は車の運転中、数秒後に到達する先の地点と目標とする地点の偏差を予測し、操舵を行うことがわかっている。そこで、通常ドライバが見ている1秒後に到達する地点から、さらに、遅れ時間を補償した先の地点(以下、前方注視点)を仮想的に示し、そこを注視しながら運転してもらうこととした。この遅れ時間を補償した前方注視点までの距離を、式(1)に示す。
本研究では、連続的な操舵が必要となるパイロンスラロームを実験コースとし、操縦性の基本的な観点を評価した。小型EVを用いた実車実験では、パイロンの間隔は10mとし、最初の直線区間は助走のために16mとした。車速10km/h、15km/h、20km/hの3パターンを、1人のドライバにつき、各条件それぞれ 3回ずつ走行した。走行コースを図3(略)に示す。
(3)予備実験による課題の抽出
被験者には実験コースを毎回同じ軌跡を走行するよう指示し車両を運転してもらった。実際に被験者が運転した結果を図 4(略)に、又、遠隔運転した結果を図5(略)に示す。
その結果、実車両で運転した軌跡が3パターンとも安定しているのに対し、遠隔運転した軌跡はスラローム後半でばらつきが大きくなり、20km/hではコース最後まで運転できなかった。この様に約 0.4秒の通信遅れの操縦性悪化レベルが確認できた。
(4)通信遅れの補償方法の考え方
人間は車の運転中、数秒後に到達する先の地点と目標とする地点の偏差を予測し、操舵を行うことがわかっている。そこで、通常ドライバが見ている1秒後に到達する地点から、さらに、遅れ時間を補償した先の地点(以下、前方注視点)を仮想的に示し、そこを注視しながら運転してもらうこととした。この遅れ時間を補償した前方注視点までの距離を、式(1)に示す。

この時、L が前方注視距離、V が速度、∆t が通常運転時の前方注視時間、td が遅れ補償時間とした。
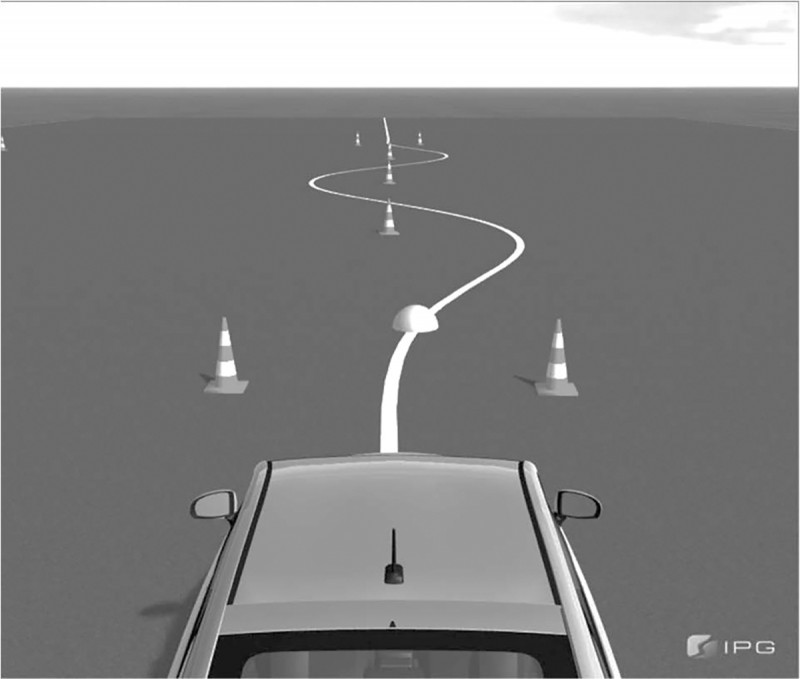
仮想シミュレータ環境で、実際にディスプレイに表示する映像を図6に示す。
仮想シミュレータ環境で、実際にディスプレイに表示する映像を図6に示す。
■ 遠隔運転の遅れ補償した仮想シミュレータ実験
(1)仮想シミュレータ環境の概要
本研究では実車実験を行う前に、簡易Driving Simulator(以下簡易DS)を構築し、仮想環境にてパネラー実験を行うこととした。最初に構築したTele Operating Systemに発生した通信等の遅れを、映像遅延として模擬し、仮想シミュレーション環境を構築した。また、運転席に置かれるディスプレイにはカメラ映像の代わりにCG (Computer Graphics)を表示し、運転者はハンドル型の入力装置を操作し制御モデルに指令を送るようにした。構築した簡易DSを図7に示す。
本研究では実車実験を行う前に、簡易Driving Simulator(以下簡易DS)を構築し、仮想環境にてパネラー実験を行うこととした。最初に構築したTele Operating Systemに発生した通信等の遅れを、映像遅延として模擬し、仮想シミュレーション環境を構築した。また、運転席に置かれるディスプレイにはカメラ映像の代わりにCG (Computer Graphics)を表示し、運転者はハンドル型の入力装置を操作し制御モデルに指令を送るようにした。構築した簡易DSを図7に示す。

(2)簡易DSでのパネラー実験
本実験では、簡易DSを用いて通信遅れを補償する前方注視点の表示が有効かどうか検証した。ハンドルによる操縦性の良否を評価するために車速一定でシミュレーションを実行させ、ドライバはステアリング操作のみを実施することとした。実験コースは実車時とは異なり、20km/hで実車と同様の運転感覚になるように調整し、パイロンの間隔を13mに広げた。被験者3名、5回/走行条件(計9条件)を実施した。
(3)実験結果
被験者1名の走行軌跡を「遅れ時間なし(実車運転 相当)」「遅れ時間あり・重畳表示なし」「遅れ時間あり・重畳表示あり」の3条件毎のデータとした(図 8、図 9、図 10(3点略))。
図 9を見ると、速度が上がる毎に追従性が悪くなり、最も速度が高い20km/hの走行条件においては走行毎に軌跡にばらつきが発生し、パイロンにも接触してしまうなど、目標経路通りに走行できないシーンが多く見られた。
一方、図10を見ると遅れ時間があっても追従性が増し、図8の遅れ時間がない場合に近い走行軌跡になっていることが確認できた。
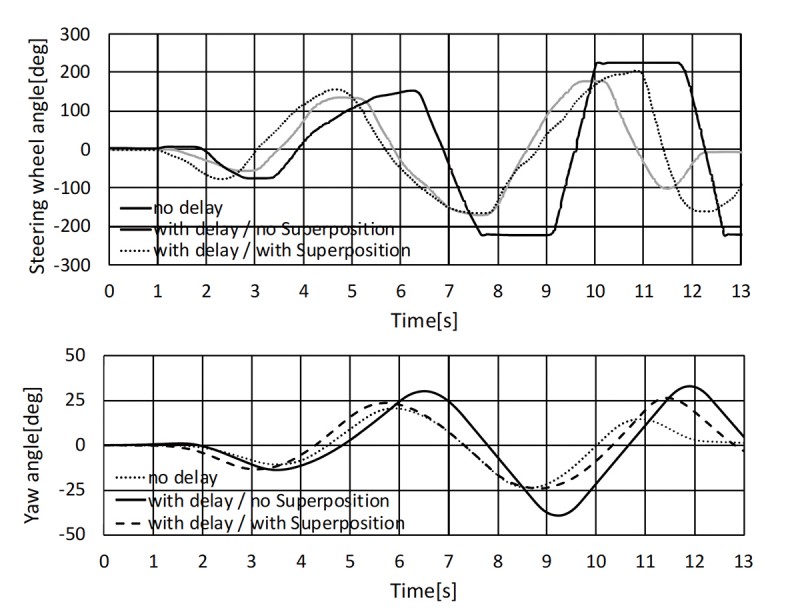
また、1走行分の操舵角δ及びヨー角φの時系列波形を図 11に示す。この結果からも、 「遅れ時間があり/重畳表示がない」場合は、「遅れ時間なし」の場合と比べ、ハンドルを反転し始めるタイミングが遅いことが確認できる。時間が経つにつれてこれが顕著になっていき、10秒後には、約2秒もの差が発生している。そのため、後半は不安定となり操舵角が大きく発散する傾向になっている。一方、「遅れ時間の補償として重畳表示を行った」場合は、10秒経過後の操舵角を見ると、ハンドルを反転するタイミ ングの差が約1秒に短縮され、より安定傾向にあることが確認できた。
本実験では、簡易DSを用いて通信遅れを補償する前方注視点の表示が有効かどうか検証した。ハンドルによる操縦性の良否を評価するために車速一定でシミュレーションを実行させ、ドライバはステアリング操作のみを実施することとした。実験コースは実車時とは異なり、20km/hで実車と同様の運転感覚になるように調整し、パイロンの間隔を13mに広げた。被験者3名、5回/走行条件(計9条件)を実施した。
(3)実験結果
被験者1名の走行軌跡を「遅れ時間なし(実車運転 相当)」「遅れ時間あり・重畳表示なし」「遅れ時間あり・重畳表示あり」の3条件毎のデータとした(図 8、図 9、図 10(3点略))。
図 9を見ると、速度が上がる毎に追従性が悪くなり、最も速度が高い20km/hの走行条件においては走行毎に軌跡にばらつきが発生し、パイロンにも接触してしまうなど、目標経路通りに走行できないシーンが多く見られた。
一方、図10を見ると遅れ時間があっても追従性が増し、図8の遅れ時間がない場合に近い走行軌跡になっていることが確認できた。
また、1走行分の操舵角δ及びヨー角φの時系列波形を図 11に示す。この結果からも、 「遅れ時間があり/重畳表示がない」場合は、「遅れ時間なし」の場合と比べ、ハンドルを反転し始めるタイミングが遅いことが確認できる。時間が経つにつれてこれが顕著になっていき、10秒後には、約2秒もの差が発生している。そのため、後半は不安定となり操舵角が大きく発散する傾向になっている。一方、「遅れ時間の補償として重畳表示を行った」場合は、10秒経過後の操舵角を見ると、ハンドルを反転するタイミ ングの差が約1秒に短縮され、より安定傾向にあることが確認できた。
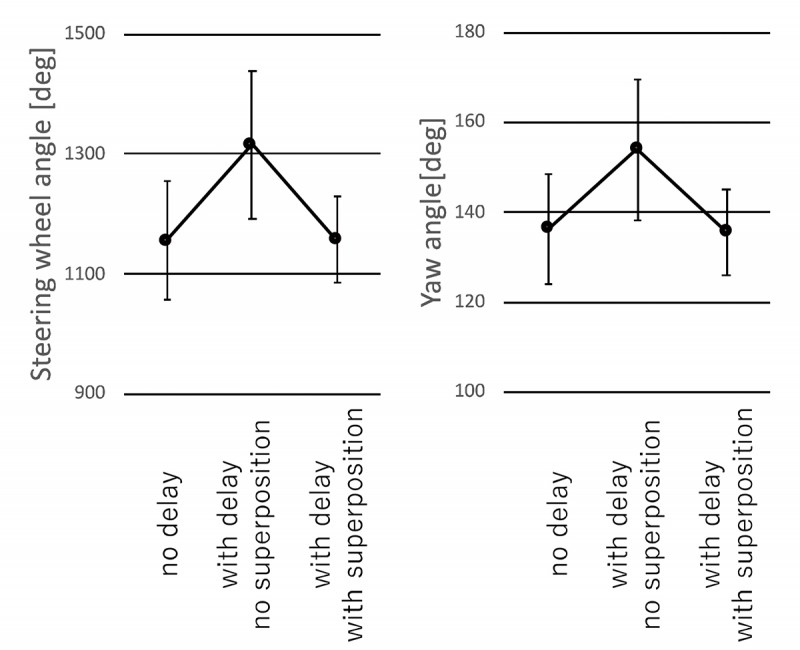
さらに、操舵角、ヨー角の絶対値の時間積分を評価指標とした結果を示す。それぞれδ*[rad],φ*[rad] とし、式(2)、(3)に基づき算出した。δ*、φ*は操舵角、ヨー角の「総和」に対応する。これらによって修正操舵や不要な操舵、車両挙動の乱れを評価する。これらの乱れがあると指標は大きな値を示し、運転しにくいことを意味する。
算出したδ*及びφ*の、被験者3名による計15走行分の平均値と標準偏差を図12に示す。δ*、φ*共に遅れ時間があり重畳表示がない場合に一番値が大きいのに対し、重畳表示がある場合は遅れ時間がない条件と同等の値となっていることが確認できる。今回の被験者3名による結果から、重畳表示による遅れ時間の補償は全員とも効果があり、操縦性の向上に繋がる傾向が見られた。さらに、被験者3名による標準偏差は重畳表示がある場合に最も値が小さくなっており、走行毎のばらつきも減少していることがわかった。
これらの結果から、目標経路と遅れ時間を補償した前方注視点の表示が、通信遅れがある中でも遠隔での操縦性を向上させる効果があることがわかった。
算出したδ*及びφ*の、被験者3名による計15走行分の平均値と標準偏差を図12に示す。δ*、φ*共に遅れ時間があり重畳表示がない場合に一番値が大きいのに対し、重畳表示がある場合は遅れ時間がない条件と同等の値となっていることが確認できる。今回の被験者3名による結果から、重畳表示による遅れ時間の補償は全員とも効果があり、操縦性の向上に繋がる傾向が見られた。さらに、被験者3名による標準偏差は重畳表示がある場合に最も値が小さくなっており、走行毎のばらつきも減少していることがわかった。
これらの結果から、目標経路と遅れ時間を補償した前方注視点の表示が、通信遅れがある中でも遠隔での操縦性を向上させる効果があることがわかった。
■ 実車における遅れの補償実験
(1)実験概要
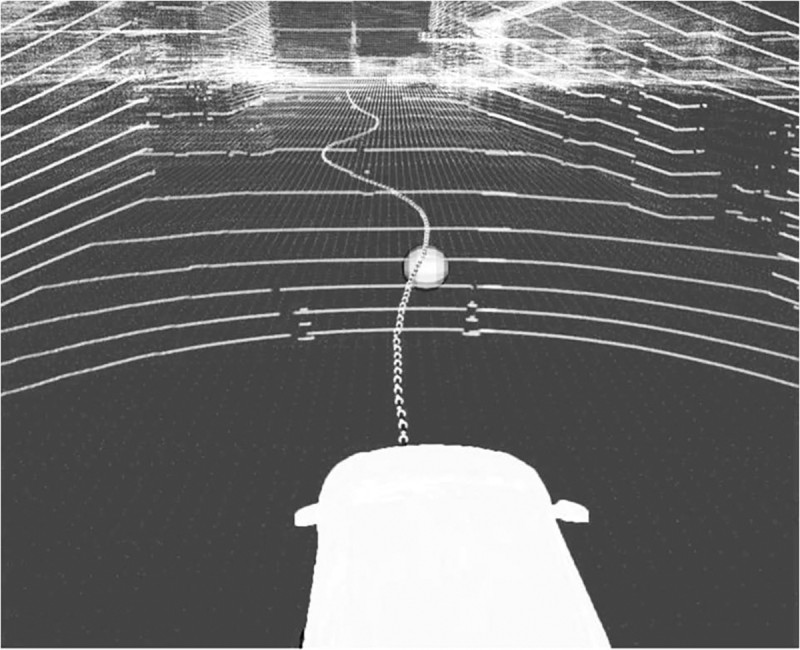
簡易DSにて確認した本システムの有効性を実車でも確認するため、実車実験を行った。この時、本来であればカメラ映像への重畳表示を行いたかったのだが、技術的難易度の観点からカメラ映像ではなくLidar情報から生成した3D点群地図に重畳表示したもので代用した。3D点群地図生成、目標経路生成、自車位置推定、これら全てをLidarにて取得したデータから行うことで、重畳表示として組み合わせた。目標経路と前方注視点を重畳表示している映像を図13に示す。実験コースは予備実験と同じもので行った。
簡易DSにて確認した本システムの有効性を実車でも確認するため、実車実験を行った。この時、本来であればカメラ映像への重畳表示を行いたかったのだが、技術的難易度の観点からカメラ映像ではなくLidar情報から生成した3D点群地図に重畳表示したもので代用した。3D点群地図生成、目標経路生成、自車位置推定、これら全てをLidarにて取得したデータから行うことで、重畳表示として組み合わせた。目標経路と前方注視点を重畳表示している映像を図13に示す。実験コースは予備実験と同じもので行った。
(2)実験結果
本実験にて何本か走行させたが、構築したシステムではコースの最後まで走りきることはできなかった。理由として考えられることを下記する。
1) 3D点群地図を用いた映像はカメラ映像より更に遅れている可能性があるためと推定される。Lidarの3Dデータ周期が100msであり、通信遅れの0.4秒を加え、0.5秒の遅れになっていると予想される。
2)カメラ映像に比べLidar映像の臨場感はなく、人間が知覚反応する実験としては無理があった。
(3)実車での遅れ時間補償方法に対する考察
この実験を通じて、通信遅れを補償し実車の操縦性を向上させる方法は3つ創出できた。
1)遅れ時間に人間が慣れることで操縦性を向上させる。この慣れによる効果は簡易DSにおける実験でも確認できている。
2)カメラ映像への重畳を実現させる(今回の狙い)。
3)遅れ時間の補償として自律運転技術を使う。常時 約 0.4 秒だけを自律運転させ通信遅れを補償する。
以上が、遠隔運転者が運転しやすいシステムを構築する方法として考えられる。
本実験にて何本か走行させたが、構築したシステムではコースの最後まで走りきることはできなかった。理由として考えられることを下記する。
1) 3D点群地図を用いた映像はカメラ映像より更に遅れている可能性があるためと推定される。Lidarの3Dデータ周期が100msであり、通信遅れの0.4秒を加え、0.5秒の遅れになっていると予想される。
2)カメラ映像に比べLidar映像の臨場感はなく、人間が知覚反応する実験としては無理があった。
(3)実車での遅れ時間補償方法に対する考察
この実験を通じて、通信遅れを補償し実車の操縦性を向上させる方法は3つ創出できた。
1)遅れ時間に人間が慣れることで操縦性を向上させる。この慣れによる効果は簡易DSにおける実験でも確認できている。
2)カメラ映像への重畳を実現させる(今回の狙い)。
3)遅れ時間の補償として自律運転技術を使う。常時 約 0.4 秒だけを自律運転させ通信遅れを補償する。
以上が、遠隔運転者が運転しやすいシステムを構築する方法として考えられる。
■ 結言
本研究は、Tele Operating Systemの課題である通信遅れによる操縦性の悪化を補償する為に簡易DSを構築し、模擬実験を実施した。その結果、簡易DSでも、映像遅れをシミュレートすることで実車と同等の結果が得られ有効性が検証できた。また、遅れ時間を補償した前方注視点を映像に入れることで被験者の操縦性を向上させられることが確認でき、遅れ時間を補償した重畳表示が有効と言える。
実車ではカメラ映像への重畳表示を実施できなかったが、本研究を通じて、約0.4秒だけを自律運転させ通信遅れを補償するアイディア等も創出でき、今後の検証方法を検討していく。
実車ではカメラ映像への重畳表示を実施できなかったが、本研究を通じて、約0.4秒だけを自律運転させ通信遅れを補償するアイディア等も創出でき、今後の検証方法を検討していく。
-
 指導教員からのコメント
自動運転・運転支援研究室教授 井上 秀雄
指導教員からのコメント
自動運転・運転支援研究室教授 井上 秀雄
- 自動運転分野では、Tele-operating system(遠隔運転)が用いられることがありますが、通信遅れの課題があり、その利用価値があまり明確になっていませんでした。本研究は、遠隔運転において、通信遅れをドライバの前方注視の先読み情報として補償することで、どれくらい遠隔運転のし易さが向上するかに注目したユニークな研究です。基礎的なスラローム走行条件ですが、これらの先読み情報とODD(Operational Design Domain;運行設計領域)の関係を示すことができました。今後は、この先読み情報として車両前方監視センサ/3D地図/通信画像のバランスの構築がポイントとなります。木部君は実際のシステム構築に大変な苦労はありましたが、実験結果には達成感があり良い経験になったと思います。
- 創造工学部自動車システム開発工学科(大学サイト )
- 教員紹介ページ(大学サイト )
- 研究室ナビ(大学サイト)
