卒業研究のご紹介
2019年版
機械・自動車・ロボット系所属学生
前後ロールセンター高さの違いが操舵行動に及ぼす影響
佐藤 一貴福島県
大学院機械システム工学専攻 博士前期課程2019年3月修了
(創造工学部自動車システム開発工学科 2017年3月卒業)
(創造工学部自動車システム開発工学科 2017年3月卒業)
福島県立会津学鳳高等学校出身
研究の目的
過去のクルマの操縦性を向上する G-Vectoring制御の研究では、旋回時の微小な車体のピッチ(クルマの前が下がる)運動がクルマの操縦しやすさの評価に影響を与えていることが分かっている。一方で、このような旋回時のピッチ運動は、ロール(クルマの左右への傾き)軸に傾きをつけると似たピッチ運動を発生させることができる。
そのため本研究では、ロール軸の傾きを変えた設定を用意し、クルマの運動を高精度に再現できるドライビングシミュレータを用い、人が操作しやすいロール軸の傾斜を検討した。この研究結果を基にすることで、実際のクルマの設計において、ロール軸の傾きを決定するための条件を見出すことが可能となると考えている。
そのため本研究では、ロール軸の傾きを変えた設定を用意し、クルマの運動を高精度に再現できるドライビングシミュレータを用い、人が操作しやすいロール軸の傾斜を検討した。この研究結果を基にすることで、実際のクルマの設計において、ロール軸の傾きを決定するための条件を見出すことが可能となると考えている。
■ 力学モデル
本研究で使用した力学モデルでは前述の通りサスペンションリンク機構を考慮している。タイヤの接地中心からリンクの瞬間回転中心を結ぶ仮想サスペンションアームを通して、タイヤの前後力・横力が車体に伝わる。
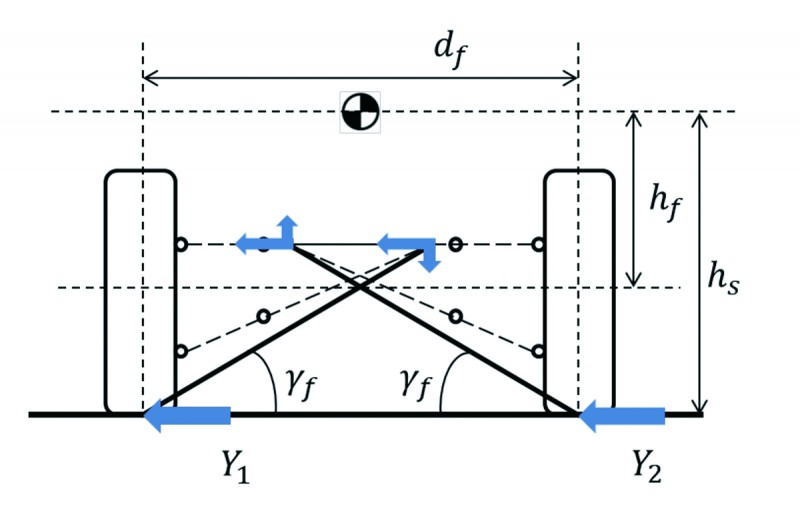
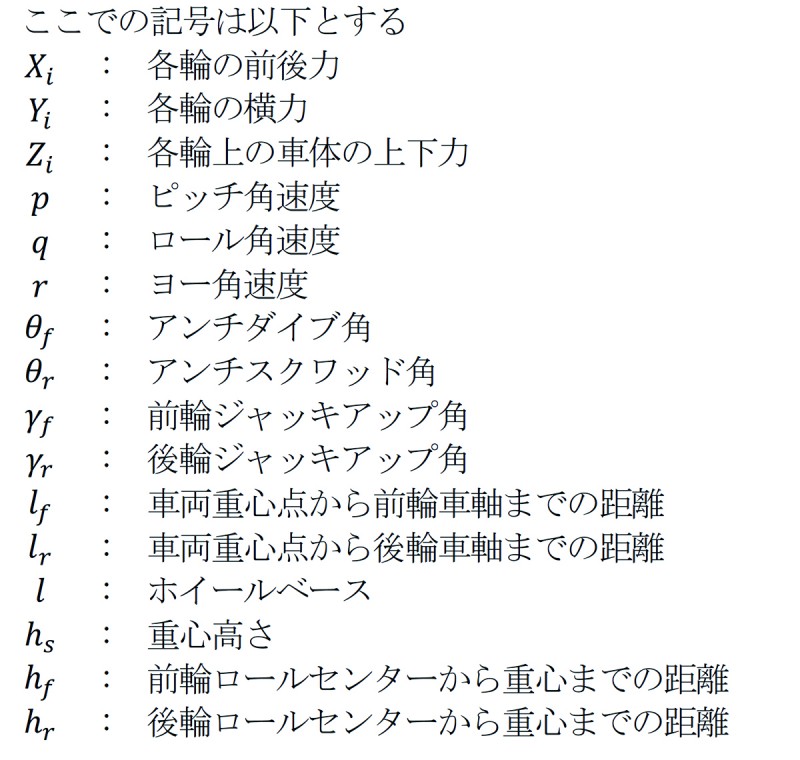
図4に横力によるジャッキアップ力の発生メカニズムを示す。旋回時に発生したタイヤ横力は、外輪側は車体を持ち上げる方向、内輪側は車体を引き下げる方向に力が働く。前後輪位置でジャッキアップ力に差が生まれると、車体の微小なピッチ運動となる。
■ 実験方法
●実験モード
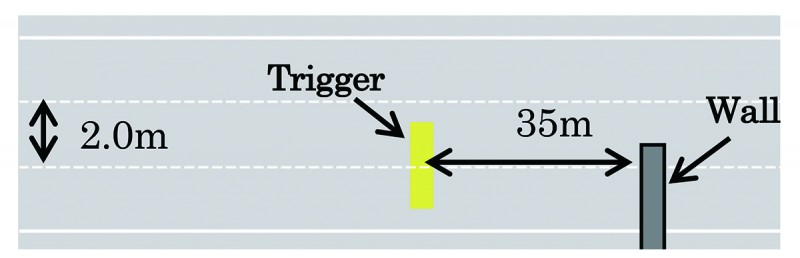
走行するコースは図6のように車線幅2.0[m]の3車線の道路を設定した。走行は各車線間にある鎖線上を走行するようにした。一方の鎖線上を走行し、ある地点を通過するとその地点から35[m]前方に、高さ1mの壁が出現する。その壁をよけもう一方の鎖線上を走行するというモードで実験を行った。また、壁の出現はランダムで、壁の出現を予測することは困難である。車速は一定速60[km/h]に制御され、ドライバはステアリング操作のみでタスクを行う。
走行するコースは図6のように車線幅2.0[m]の3車線の道路を設定した。走行は各車線間にある鎖線上を走行するようにした。一方の鎖線上を走行し、ある地点を通過するとその地点から35[m]前方に、高さ1mの壁が出現する。その壁をよけもう一方の鎖線上を走行するというモードで実験を行った。また、壁の出現はランダムで、壁の出現を予測することは困難である。車速は一定速60[km/h]に制御され、ドライバはステアリング操作のみでタスクを行う。
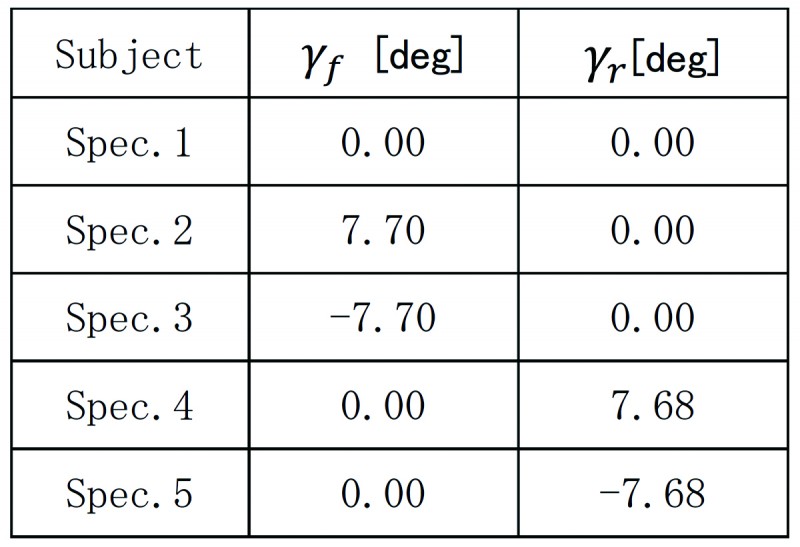
●実験仕様実験仕様は表2のように、前後のジャッキアップ角を変化させた5仕様で行った。
各仕様において0.5[Hz]のサイン操舵を行った時の、ロール、ピッチ運動、ジャッキアップ力によるピッチモーメント、ロール角とピッチ角のリサージュ曲線を図7〜11(図省略)に示す。
図8(図省略)を見ると、前後ロールセンター高さの違いにより、ロール量も変化していることがわかる。一方、ピッチ運動については、図9(図省略)のように操舵開始のタイミングでコーナリングドラッグによる前傾のピッチが起こる。コーナリングドラッグによるピッチ運動は各仕様で一様であるが、ジャッキアップ角が付き、ロール軸が前上がりとなる仕様ではピッチが抑制され、ロール軸が前下がりとなる仕様ではピッチ運動を増幅させる。図10(図省略)はジャッキアップ力によるピッチモーメントを表しており、Spec.1では、ジャッキアップ角がついていないため、ピッチモーメントは発生しない。また、後輪は前輪に比べて横力の発生が遅いため、後輪にジャッキアップ角をつけている仕様では、ジャッキアップ力によるピッチモーメントの位相が遅れている。
図8(図省略)を見ると、前後ロールセンター高さの違いにより、ロール量も変化していることがわかる。一方、ピッチ運動については、図9(図省略)のように操舵開始のタイミングでコーナリングドラッグによる前傾のピッチが起こる。コーナリングドラッグによるピッチ運動は各仕様で一様であるが、ジャッキアップ角が付き、ロール軸が前上がりとなる仕様ではピッチが抑制され、ロール軸が前下がりとなる仕様ではピッチ運動を増幅させる。図10(図省略)はジャッキアップ力によるピッチモーメントを表しており、Spec.1では、ジャッキアップ角がついていないため、ピッチモーメントは発生しない。また、後輪は前輪に比べて横力の発生が遅いため、後輪にジャッキアップ角をつけている仕様では、ジャッキアップ力によるピッチモーメントの位相が遅れている。
■ 実験結果
各被験者の計測データを用い、ドライバパラメータの同定を行い、走行タスク毎に走行軌跡が類似する7つの試行を選んだ。この試行群から得たドライバパラメータを、被験者ごとに平均化した結果を図13(図省略)に、全被験者の結果を合わせて平均化したものを図14に示す。
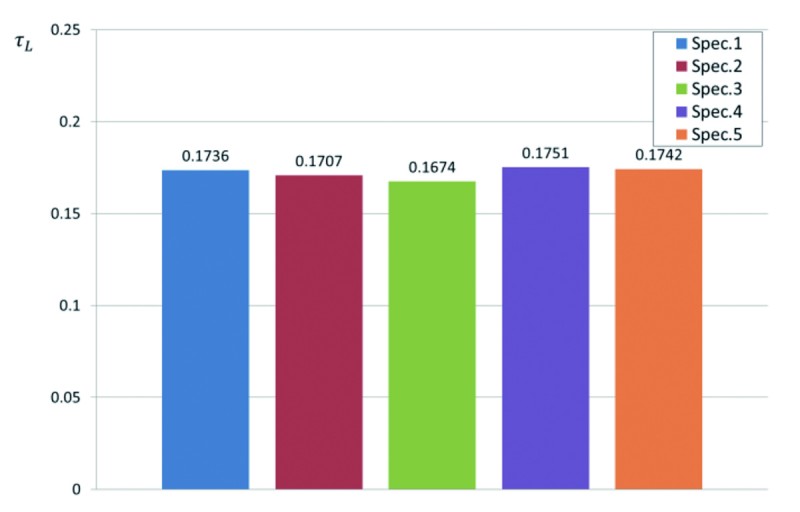
図13(図省略)のグラフでは、ドライバごとのばらつきがあるため、図14のグラフを見ると、τ_Lの値が大きくなると思われた前傾ピッチの仕様であるSpec.3のτ_Lの値が小さくなる結果となった。
-
 指導教員からのコメント
教授 山門 誠
指導教員からのコメント
教授 山門 誠
- 車体のロール(横方向の傾き)やピッチ(前後方向の傾き)に対して理想の車両姿勢の追求は、現在最も活発に行われている研究である。というのも事故回避、ライントレースなど平面的な車両運動に対する価値(ぶつからない、ラインを正確に辿れる)は明確であるが、このときの理想の車両姿勢については、明確な指針が得られていない。本学の国内屈指のドライビングシミュレータを用いた佐藤君の研究で、その一端が垣間見られたと考える。そもそもロール角傾斜がどうあるべきか、それがドライバの操舵行動にどのような影響を及ぼすかを明らかにしながら、自動車メーカとの共同研究などを経て、研究成果を製品として世に出し、人々を笑顔にする研究を続けていく。
-
 修士研究学生からの一言
佐藤 一貴
修士研究学生からの一言
佐藤 一貴
- 研究活動では、1つの研究課題を行う中でも多くの知識をもっている必要性を痛感しました。自分のやりたいことがあっても設備がなければできませんが、本学は、実験を行うための設備が充実しており、研究を進めるうえで重要な機材なども追加導入できるなど、研究しやすい環境なので、とても良かったと考えています。また、研究成果をまとめ、学会での発表経験により、苦手意識のあったプレゼンテーションも自信をつけられました。
- 創造工学部自動車システム開発工学科(大学サイト )
- 教員紹介ページ(大学サイト )
- 研究室ナビ(大学サイト)
