卒業研究のご紹介
2020年版
機械・自動車・ロボット系所属学生
カルマンフィルタを用いた歩行者行動予測と予測円の生成
後藤 拓海神奈川県
創造工学部自動車システム開発工学科 2020年3月卒業
神奈川県立湘南台高等学校出身
研究の目的
現在、少子高齢化が進み人々を手助けする自律走行ロボットが必要とされ始めている。将来、人々の手助けをするたくさんの自律走行ロボットが街中を走り回る日が来ると考える。本研究では、自律走行ロボットが歩行者とスムーズなすれ違いを行うための予測円を生成する。動かない障害物を回避する従来研究は数多く存在しているが、動く障害物を回避することは難しい。動く障害物すなわち歩行者を回避するため、さらに安全性だけでなく快適性を考慮した歩行者回避を行う。そのための予測として予測円を生成する。自然な歩行者を計測しデータを収集し、その計測データを基に歩行者の行動を予測する。予測の範囲を楕円で表示する。
研究内容や成果等
■ 実験装置および方法
本研究ではポイントクラウドを用いた物体認識を使用し人検出を行う。予測円生成の流れをFig.1に示す。
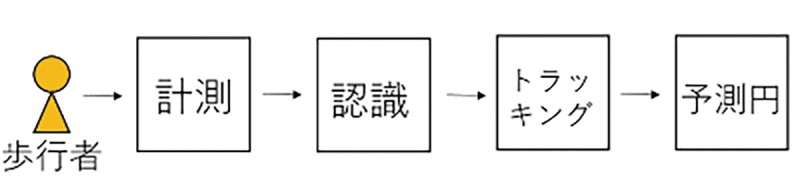
計測は全方位レーザセンサ(Laser Image Detection and Ranging;LiDAR)を用いて歩行者の位置形状を表すポイントクラウドデータを取得した。
計測実験は歩行の軌道を指定した歩行者と大学構内の自然な歩行者との2種類を行った。自然な歩行者の計測は大学の昼休み40分間を3箇所、計4回行った。LiDARは固定し歩行者の流れを遮らないように設置した。
認識は、ポイントクラウドデータより平面を推定し床面を除去する。その後、床面を除去したポイントクラウドデータにクラスタリングを行い、検出対象を推定する。本研究では、点群同士の距離に基づきグループ化の判断を行った。観測範囲を日本人成人の腰から胸の高さに指定した。これは、動きの多い足や観測できる面積の少ない顔を除くことで人認識の精度がよくなるためである。
トラッキングは各フレームで動くオブジェクトを検出し同じオブジェクトに時間の経過と共に対応する検出の関連付けを行う。検出を同じオブジェクトに関連付ける処理は動きだけに基づいて行われる。各トラックの動きは各フレームにおけるトラックの位置を予測し、各検出が各トラックに割り当てる確率を判定するフィルタ(カルマンフィルタ)によって推定される。カルマンフィルタを使用して検出物の将来の位置を予測し、検出された位置のノイズを低減し、複数の検出物を対応するトラックに関連づける。割り当てられていない検出、トラックがあれば新しいトラックを開始する。
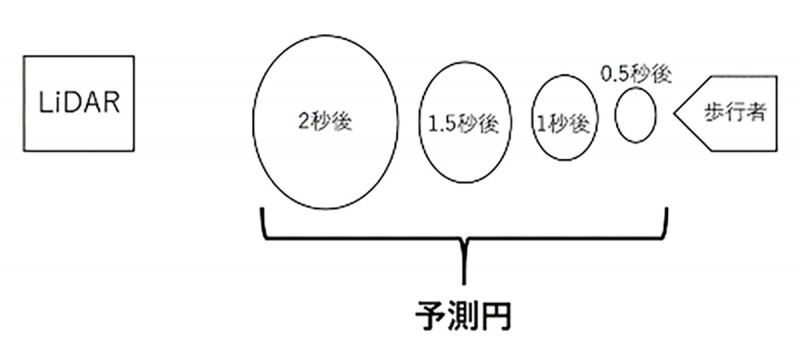
予測円の生成には、カルマンフィルタを使用しセンサで観測された値から、対象の状態、位置・速度を用いた。2秒後の予測円の中心点は推定された速度より求めた2秒後の推定位置とした。歩行者は速度一定と仮定する。楕円の大きさはカルマンフィルタによる推定位置と計測した実際の歩行者位置との誤差分布を基に決定した。誤差のばらつきの統計より標準偏差を計算し楕円の直径に設定した。2秒後の予測円を基準に1.5秒後,1.0秒後,0.5秒後の予測円を生成する。楕円の大きさは標準偏差によるものなので約68%の歩行者が予測円のなかに収まる。予測円のイメージをFig.2に示す。
計測実験は歩行の軌道を指定した歩行者と大学構内の自然な歩行者との2種類を行った。自然な歩行者の計測は大学の昼休み40分間を3箇所、計4回行った。LiDARは固定し歩行者の流れを遮らないように設置した。
認識は、ポイントクラウドデータより平面を推定し床面を除去する。その後、床面を除去したポイントクラウドデータにクラスタリングを行い、検出対象を推定する。本研究では、点群同士の距離に基づきグループ化の判断を行った。観測範囲を日本人成人の腰から胸の高さに指定した。これは、動きの多い足や観測できる面積の少ない顔を除くことで人認識の精度がよくなるためである。
トラッキングは各フレームで動くオブジェクトを検出し同じオブジェクトに時間の経過と共に対応する検出の関連付けを行う。検出を同じオブジェクトに関連付ける処理は動きだけに基づいて行われる。各トラックの動きは各フレームにおけるトラックの位置を予測し、各検出が各トラックに割り当てる確率を判定するフィルタ(カルマンフィルタ)によって推定される。カルマンフィルタを使用して検出物の将来の位置を予測し、検出された位置のノイズを低減し、複数の検出物を対応するトラックに関連づける。割り当てられていない検出、トラックがあれば新しいトラックを開始する。
予測円の生成には、カルマンフィルタを使用しセンサで観測された値から、対象の状態、位置・速度を用いた。2秒後の予測円の中心点は推定された速度より求めた2秒後の推定位置とした。歩行者は速度一定と仮定する。楕円の大きさはカルマンフィルタによる推定位置と計測した実際の歩行者位置との誤差分布を基に決定した。誤差のばらつきの統計より標準偏差を計算し楕円の直径に設定した。2秒後の予測円を基準に1.5秒後,1.0秒後,0.5秒後の予測円を生成する。楕円の大きさは標準偏差によるものなので約68%の歩行者が予測円のなかに収まる。予測円のイメージをFig.2に示す。
■ 結果
大学構内のc6号館と図書館の間にLiDARを設置し歩行者を計測した際の予測と計測との誤差ヒストグラムを示す(x方向:Fig.3,y方向:Fig.4).
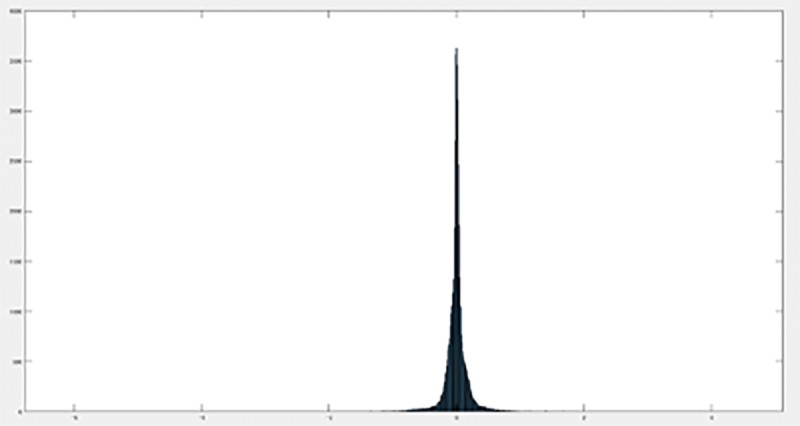
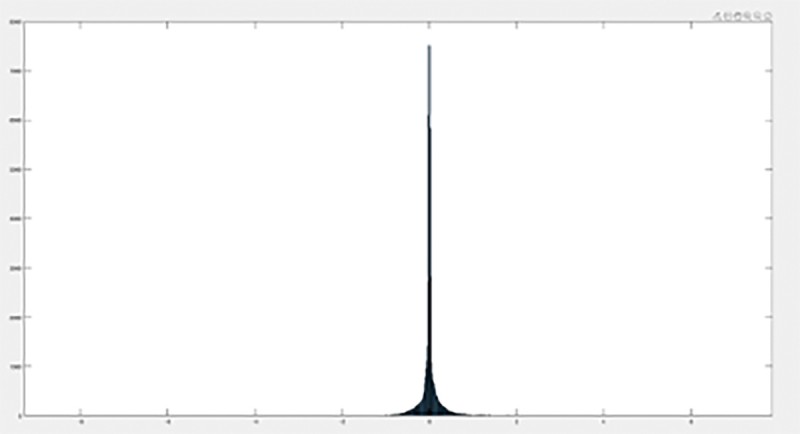
2秒後の歩行者の誤差を標準偏差で計算し整理したものをTable.1(略)に示す。標準偏差のx方向、y方向でそれぞれの平均は0.517m、0.474mとなった。
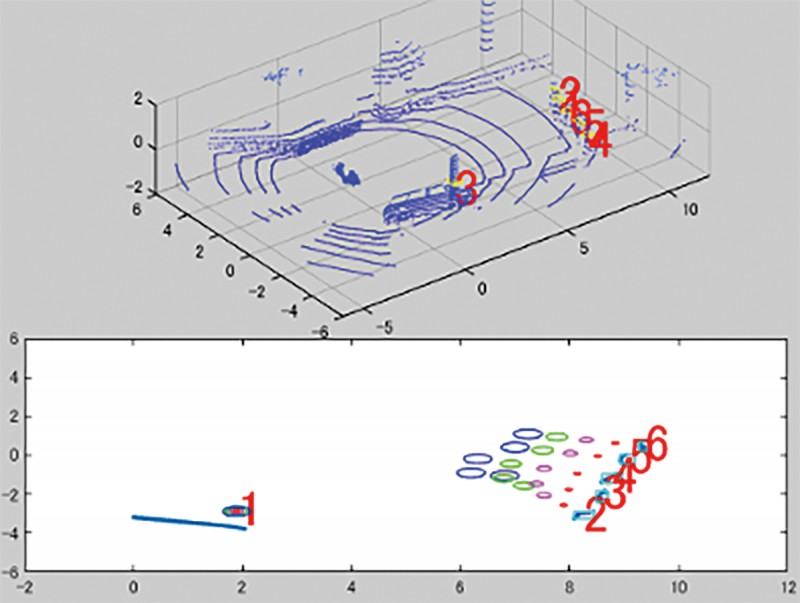
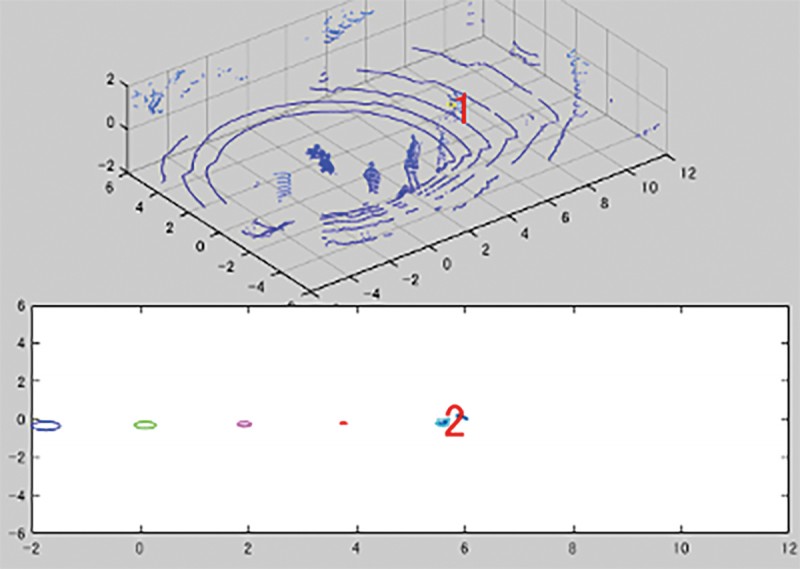
これらのデータより予測円を生成した。大学構内のc6号館と図書館の間の歩行者の結果をFig.5、自転車の結果をFig.6に示す。上段は計測結果をポイントクラウドで、検出結果を番号で示した。下段はトラッキング結果をトラック番号で予測結果を、0.5秒、1秒、1.5秒、2秒後の予測円で示した。
これらのデータより予測円を生成した。大学構内のc6号館と図書館の間の歩行者の結果をFig.5、自転車の結果をFig.6に示す。上段は計測結果をポイントクラウドで、検出結果を番号で示した。下段はトラッキング結果をトラック番号で予測結果を、0.5秒、1秒、1.5秒、2秒後の予測円で示した。
■ 考察
生成した予測円を避けるように自律走行ロボットが経路を生成すれば歩行者とのスムーズなすれ違いを行えると考える。予測円は早い段階で危険を察知するために使用する。よって、予測円の予測が外れてしまっても自律走行ロボットに適切な回避システムがあれば衝突せずに回避することができる。
■ 結論
本研究では自律走行ロボットが歩行者と効率よくスムーズなすれ違いを行うための予測円を生成した。予測円は約68%の歩行者が円内に入るように生成した。歩行者が物や人の影に長い時間重ならなければ約68%の歩行者の予測に成功した。予測円を使ったロボットと歩行者のスムーズなすれ違いを実現するためには、予測が外れた場合でも衝突を絶対に回避する緊急回避プログラムが望まれる。
-
 指導教員からのコメント
ヒューマンインタフェイス研究室教授 脇田 敏裕
指導教員からのコメント
ヒューマンインタフェイス研究室教授 脇田 敏裕
- この研究は、モビリティのより円滑な移動能力を開発するために行いました。キャンパスで歩く学生のデータを丁寧に収集・分析した結果です。後藤君は本テーマに正面から向き合い、カルマンフィルタやトラッキングなどの理論を理解した上で、収集実験や分析に精力的に取り組みました。実験や分析に着実に取り組み、必ず毎週結果を出す姿勢は、今後社会で多くの人の信頼を得るものと思います。得られた研究結果は、新年度のモビリティづくりに反映される予定です。
-
 卒業研究学生からの一言
後藤 拓海
卒業研究学生からの一言
後藤 拓海
- 本学の授業では基礎的な力学を学び、研究室ではmatlabなどのプログラムを学びました。私が所属した脇田研究室は、私たちの代から始まる新しい研究室で最初は何もない部屋から始まりました。脇田教授と同級生のメンバーの方と協力して研究室を立ち上げ、とても楽しい1年になりました。脇田教授からプログラムを一から学び、後半は自分でプログラムを書き、研究を行えるようになりました。最後は研究室の環境も整い、自分たちの研究も進み、研究室と共に成長できました。
- 創造工学部自動車システム開発工学科(大学サイト )
- 教員紹介ページ(大学サイト )
- 研究室ナビ(大学サイト)
