卒業研究のご紹介
2021年版
機械・自動車・ロボット系所属学生
コース前方曲率に応じた自動回生ブレーキ制御の競技用EVへの適用検討
渡邊 久葉栃木県
大学院機械システム工学専攻 博士前期課程1年
(創造工学部自動車システム開発工学科2021年3月卒業)
(創造工学部自動車システム開発工学科2021年3月卒業)
栃木県立宇都宮工業高等学校出身
研究の目的
競技用の電気自動車において、軽量化は加速性能の向上やコースを完走するために最も重要な検討事項となる。2019年の学生フォーミュラ日本大会へ出場した車両では、全体車重300kgのうち26.7%を占める80kgがバッテリー重量であり、2021年に出場予定である車両の目標重量250kgを達成するためには、バッテリー容量を見直す必要があると考えた。限られた容量でタイムも落とすことなく走り切るには、フットブレーキをなるべく踏まずに制御によって十分な減速を行うことで、より長い時間回生エネルギを取得できる。そこで、エキスパートドライバに近い運転操作を再現することができるG-Vectoring Controlの制御則をドライビングシミュレータへ適用し、競技コースにおいてラップタイムとエネルギ効率が最適となるGVCの加減速制御量の組み合わせを検討した。
研究内容や成果等
■ G-Vectoring Control

Gxは車両前後方向の加速度指令、Gyは車両横方向の加速度、Gyは横加速度を一回微分した値の横加加速度、CxyをGVCゲインとする。車両の横加加速度Gyの絶対値にGVCゲインCxyをかけ一時遅れを付与した値を、旋回開始時に減速が加わり終了時に加速するように符号を決定することで前後指示加速度Gxにするというシンプルな制御則である。
■ 走行実験
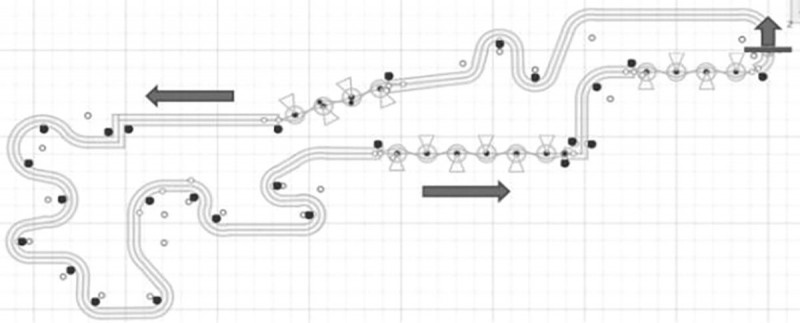
学生フォーミュラを題材とし、タイムや消費効率を長距離走行にて評価するエンデュランスコースをDS上に再現した。コースの全長は約1042m、スラロームとシケインを含むR5以下、S字や複合コーナーを含むR5からR10、緩やかなコーナーと直線部分を含むR10以上のコーナーを想定して3水準に分けた。
本研究ではカートでの競技経験がある3人を被験者とし、各仕様を2〜10周走行し、その平均値を分析に使用した。大会ではこのコースを2名のドライバで合計22周走行する。なお、実験前に全ての被験者からインフォームド・コンセントを得て実験を行った。
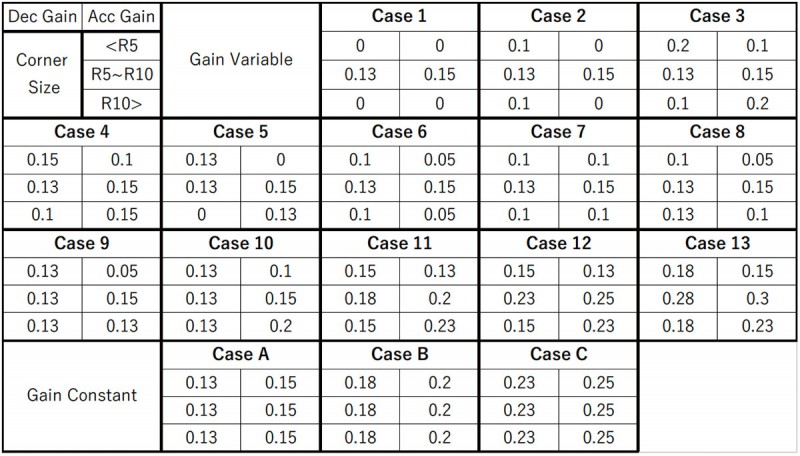
先行研究の主観評価の結果から、加減速ゲイン一定[0.13:0.15]を基準の仕様としてCase Aと定めた。Case 1〜10で、ゲイン可変の制御を行う有効性と最適なゲインの組み合わせを調査した。Case Aより0.5ずつゲインを大きくしたCase B、Cに対になるようにCase 11、12を定めた。ここに、制御を稼働せずに走行したデータも加えた計17種類の仕様を用いて比較、分析を行った。
本研究ではカートでの競技経験がある3人を被験者とし、各仕様を2〜10周走行し、その平均値を分析に使用した。大会ではこのコースを2名のドライバで合計22周走行する。なお、実験前に全ての被験者からインフォームド・コンセントを得て実験を行った。
先行研究の主観評価の結果から、加減速ゲイン一定[0.13:0.15]を基準の仕様としてCase Aと定めた。Case 1〜10で、ゲイン可変の制御を行う有効性と最適なゲインの組み合わせを調査した。Case Aより0.5ずつゲインを大きくしたCase B、Cに対になるようにCase 11、12を定めた。ここに、制御を稼働せずに走行したデータも加えた計17種類の仕様を用いて比較、分析を行った。
■ 実験結果と考察
(1)ラップタイムの分析
まず、GVC無しと最速タイムを出したCase13を比較すると、23.8秒と大幅にタイムを短縮することができている。GVC無しの時は、後輪の前後力による横力の低下のためコースアウトを恐れて旋回中にアクセルを踏み込めないのだが、GVCの加速制御により横運動と連携した加速が自動的に実現でき、より限界状態に近い加速が可能となったからだと考えられる。
R5以下では加速制御を小さく、R10以上では加速制御を大きくした方が速いのではないかと仮説を立てたCase 3〜5、Case 9〜13の結果は、全てが125秒以下となり他仕様よりも相対的にタイムが速かった。中でも、R10以上の加速ゲインを0.2にしているCase 3、 10では121秒台、さらに加速ゲインを大きくしたCase 11〜13では115秒以下となっていることからも、加減速制御は全てのコーナーにおいて入れた方が速くなり、中でもR10以上の加速ゲインを0.2以上と大きく設定することでより速くなる。しかし、加速ゲインを大きく設定しすぎると、次のコーナーの進入時に減速しきれず、フットブレーキを踏み余計なタイムロスを生んでしまう様子が見受けられた。
まず、GVC無しと最速タイムを出したCase13を比較すると、23.8秒と大幅にタイムを短縮することができている。GVC無しの時は、後輪の前後力による横力の低下のためコースアウトを恐れて旋回中にアクセルを踏み込めないのだが、GVCの加速制御により横運動と連携した加速が自動的に実現でき、より限界状態に近い加速が可能となったからだと考えられる。
R5以下では加速制御を小さく、R10以上では加速制御を大きくした方が速いのではないかと仮説を立てたCase 3〜5、Case 9〜13の結果は、全てが125秒以下となり他仕様よりも相対的にタイムが速かった。中でも、R10以上の加速ゲインを0.2にしているCase 3、 10では121秒台、さらに加速ゲインを大きくしたCase 11〜13では115秒以下となっていることからも、加減速制御は全てのコーナーにおいて入れた方が速くなり、中でもR10以上の加速ゲインを0.2以上と大きく設定することでより速くなる。しかし、加速ゲインを大きく設定しすぎると、次のコーナーの進入時に減速しきれず、フットブレーキを踏み余計なタイムロスを生んでしまう様子が見受けられた。
(2)エネルギ消費の分析
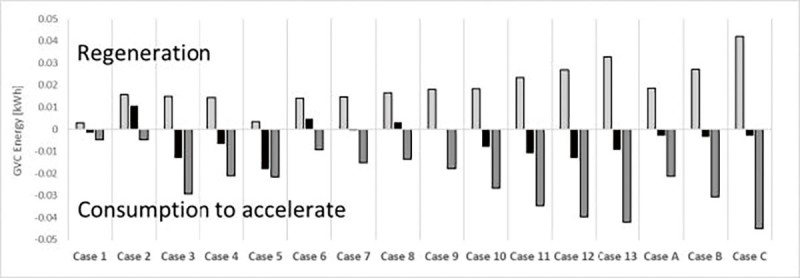
GVCの加速による消費量と減速による回生量、それらを合計したエネルギ量を各仕様で比較したものがFig.3である。合計で回生側をプラスにできたのは、加速より減速のゲインを大きく設定したCase 2、6、8のみであったが、これでは加速消費側が少なすぎて効率的ではない。Case Cでは、回生量を多く取得しているのに対して消費も相応量行っているため、加速と減速のバランスが取れている。
これらの結果より、加速ゲインより減速ゲインを少なくとも0.02程度小さい値から同じ値とすることで、バランス良く加減速を行った上で合計エネルギも回生側をプラスにできることが分かった。
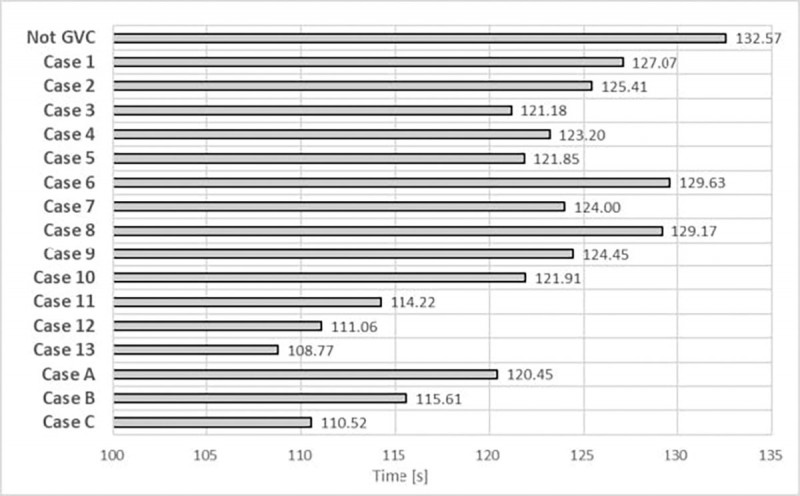
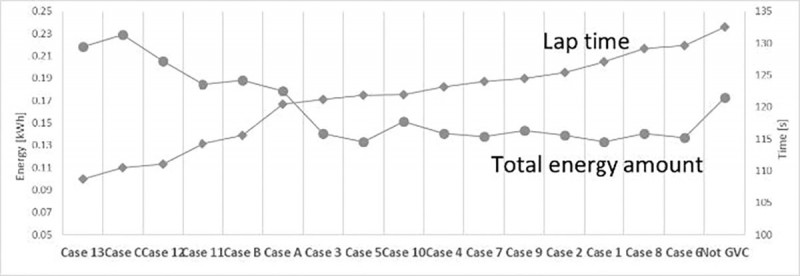
Fig.4は、1周走行するために消費された総合エネルギ量をタイムが速い順に仕様を並べ替えて示した。この値は、加速によるエネルギ消費とフットブレーキの熱損失、空気抵抗と転がり抵抗などの合計値であり、GVCによる効果も含まれている。
Case AとGVC無しはエネルギ量が大差ないにも関わらず、タイムには約12秒の差がある。Case Cと12では、タイムは約0.5秒と大差ないにも関わらず、エネルギ量はCase 12の方が大幅に少ないため効率が良い。よって、GVCゲインは一定よりコーナーに応じて可変にした方が、タイムとエネルギ量の両方から見ても優れているということが分かった。
GVCの加速による消費量と減速による回生量、それらを合計したエネルギ量を各仕様で比較したものがFig.3である。合計で回生側をプラスにできたのは、加速より減速のゲインを大きく設定したCase 2、6、8のみであったが、これでは加速消費側が少なすぎて効率的ではない。Case Cでは、回生量を多く取得しているのに対して消費も相応量行っているため、加速と減速のバランスが取れている。
これらの結果より、加速ゲインより減速ゲインを少なくとも0.02程度小さい値から同じ値とすることで、バランス良く加減速を行った上で合計エネルギも回生側をプラスにできることが分かった。
Fig.4は、1周走行するために消費された総合エネルギ量をタイムが速い順に仕様を並べ替えて示した。この値は、加速によるエネルギ消費とフットブレーキの熱損失、空気抵抗と転がり抵抗などの合計値であり、GVCによる効果も含まれている。
Case AとGVC無しはエネルギ量が大差ないにも関わらず、タイムには約12秒の差がある。Case Cと12では、タイムは約0.5秒と大差ないにも関わらず、エネルギ量はCase 12の方が大幅に少ないため効率が良い。よって、GVCゲインは一定よりコーナーに応じて可変にした方が、タイムとエネルギ量の両方から見ても優れているということが分かった。
■ 結言
競技用EVに車両の横運動に基づいて加減速を制御するG-Vectoring Controlを適用し、自動回生によりラップタイム短縮とエネルギ収支精査によるバッテリー重量の削減について検討し、以下の知見を得た。
1.ラップタイムは、GVCによる加速制御の影響を大きく受ける。R10以上の加速ゲインを0.2以上とすることで、最大23.8秒タイムを短縮できた。しかし、次のコーナーの進入時に減速しきれず余計なタイムロスを生むこともあるため、設定値に上限はある。
2.エネルギ収支は、加速ゲインより減速ゲインを少なくとも0.02程度小さい値から同じ値とすることで、バランス良く加減速を行った上で合計エネルギも回生側をプラスにできることが分かった。
3.ラップタイムとエネルギ収支の両立のためには、GVCゲインは可変にするほうが良い。R5以下の場合は、減速ゲインに比べて加速ゲインを0.02程度小さく設定し、R10以上では加速ゲインを0.23近辺に設定する。
以上の知見を活かし、新型車両では、2019年度車両より約20kgの軽量化を見込むことができた。
-
 指導教員からのコメント
車両運動・制御研究室教授 山門 誠
指導教員からのコメント
車両運動・制御研究室教授 山門 誠
- 渡邊久葉さんは、大学院に進学し、学生フォーミュラプロジェクトのリーダーとして、忙しく充実した毎日を送っている。そのフォーミュラーカーに適用するベースの技術部分が卒業研究で得られた知見に裏打ちされ、実際の競技においてのアドバンテージとなっている。完走はもちろんのこと、加速試験、あるいはスキッドパット試験の結果として研究の成果を身をもって体験できることを願いたい。本大会までの車両・資料作成プロセスを懸命にこなし、満足いくコース走行ができることを祈念する。
-
 卒業研究学生からの一言
渡邊 久葉
卒業研究学生からの一言
渡邊 久葉
- 学生フォーミュラプロジェクトでの活動を通して、授業の内容だけでは理解を深めることが難しい内容でも、簡単に忘れることのない知識としてしっかりインプットすることができました。電気自動車部門に挑戦している大学は数少なく、実際の市販車開発にも通ずるレベルの内容に取り組んでいることが分かります。また、企業との連携やコスト管理、マネジメントなど全てを学生主体で行うため、就職後に即戦力となれるようなノウハウを得ることができました。
- 大学院機械システム工学専攻 博士前期課程(大学サイト )
- 研究室ナビ(大学サイト)
