卒業研究のご紹介
2019年版
機械・自動車・ロボット系所属学生
共同SLAMによる構内全域3D空間地図生成及び自動走行の研究
齊木 拓友(代表者)埼玉県
創造工学部自動車システム開発工学科 2019年3月卒業
浦和学院高等学校出身
海野 亮太静岡県
創造工学部自動車システム開発工学科 2019年3月卒業
静岡県立静岡城北高等学校出身
研究の目的
近年、世界の交通事故死者数が 100 万人を超えていることや、超高齢化社会の到来でドライバーの平均年齢の上昇に起因した様々な事故の発生に伴い、自動運転車両の開発が急務となっています。そのためには、Simultaneous Localization and Mapping、すなわち SLAM と呼ばれる技術が重要であると考えました。この SLAM はロボット研究の分野で用いられる技術で、例えば、ロボット掃除機などによく使用されています。この SLAM 技術を使用すれば、車両が走行する際に外界環境を細かな点を用いて観測し、走行した経路を中心としたオリジナルの 3D の地図を作成できます。私たちの研究では、SLAM 技術により大学構内全域の地図を作成し、任意の走行経路を設定することで実験車両にその経路をなぞる形で自動走行を行わせることが目的です。
研究内容や成果等
■ 実験車両とシステム構成
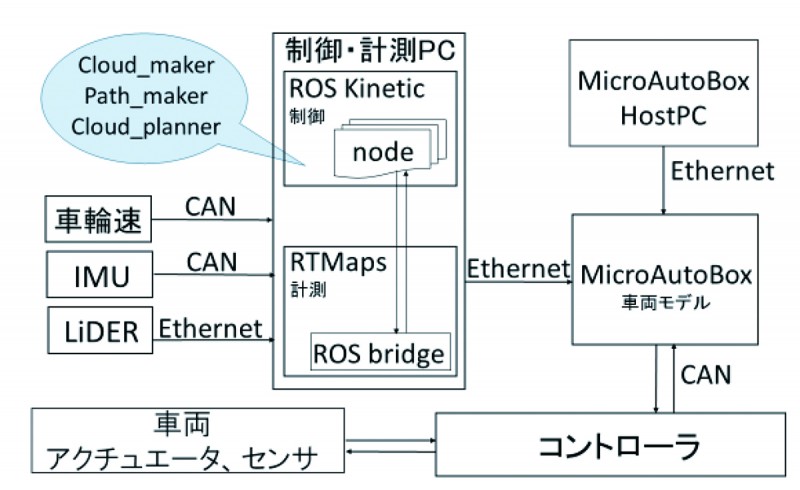
実験車両は RoboCarMV2(以下、コムス)を使用した。車両外観を図 4 に、実験車両のシステム構成を図 5 に示す。コムスには LiDER、IMU、車輪速センサ等が搭載されている。制御・計測 PC にセットアップした、Cloud_maker、Path_maker、Cloud_planner を用いて地図および各種経路を作成する。車両制御は HostPC から MicroAutoBox 経由で行う。

■ 3D空間地図作成と走行経路生成
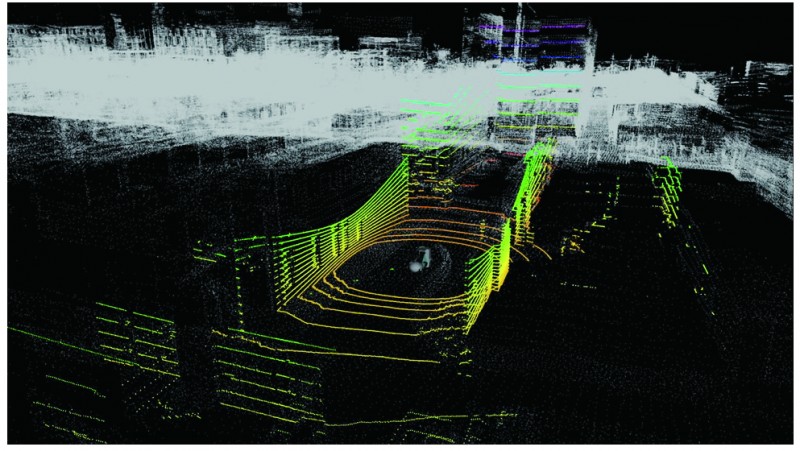
まず、3D 地図生成のために、人間がコムスを構内速度 5km/h で運転する。走行時、外観センシング及び自己位置推定を行う。記録した観測点データから 3D 空間地図を、自己位置推定により得られた 2 次元座標データから自動走行に必要な走行経路をそれぞれ生成する。
■ 自動走行実験
コムスを用いて自動走行実験を行う。実験は自動操舵制御による目標経路追従とした。
■ 結果及び考察
生成した 3D 空間地図を図 6(略)に示す。オフラインシミュレーションの様子を図 7(略)に示す。図 8 に構内航空写真と目標経路を示す(図中 A、B は最大逸脱地点)。自動運転による走行軌跡を図 9 に示す。自動走行実験の結果、スタート地点に帰還できる事や目標経路と走行経路との最大逸脱幅が約 0.5m である事が確認された。最大逸脱地点を図 8(地点 A,B)に示す。これらは累積誤差と考えられる。最大逸脱地点(2 地点)以外では逸脱幅 0.5m 以内での目標経路に対する自動走行が可能であった。

■ 結論
本研究では SLAM による構内全域 3D 空間地図を生成した。また、これらを用いて目標経路を生成し、自動走行実験を行った。この結果、実験車両がスタート地点に帰還できることや目標経路に追従できる事を確認した。
本研究では自動操舵制御による目標経路追従走行の自動化を行ったが、今後、アクセル・ブレーキ系にも制御を加えた自動運転を進めていく。
本研究では自動操舵制御による目標経路追従走行の自動化を行ったが、今後、アクセル・ブレーキ系にも制御を加えた自動運転を進めていく。

また、任意の海外研修に参加し、海外の文化に触れ、最先端の自動車技術に接する機会があり、非常に有意義な学生生活を過ごしました。