卒業研究のご紹介
2019年版
機械・自動車・ロボット系所属学生
共同Steering Shared Control の受容性評価指標の研究
弦間 一樹(代表者)山梨県
創造工学部自動車システム開発工学科 2019年3月卒業
山梨県立日川高等学校出身
貝原 聖也岡山県
創造工学部自動車システム開発工学科 2019年3月卒業
岡山県立倉敷南高等学校出身
研究の目的
Steering Shared Control(以下SSC)はドライバの操舵操作をアシストすることにより、適切な運転を目指した協調制御である。このアシストとは、ステアリングに反力を与え、ドライバの運転技量を向上させることである。高齢者へのSSC適用の有効性が、従来研究において報告されている。しかし、SSCゲイン決定方法は規範ドライバとの操舵角差から算出しているため、ドライバの意図に適したゲイン決定が出来なかった。そこで、本研究ではドライバの意図に逆らわないSSC適用ができるよう、SSCの受容性評価を行う。さらに受容性評価により、操舵アシストの質向上に資する評価指標を検証する。
研究内容や成果等
■ 規範ドライバーモデルの決定方法
適度に運転経験があり、回避能力もあるドライバーでシミュレーションを行った。この走行データを用い、規範ドライバーの運転をパラメータ同定した。パラメータ同定をする為、(3) 式に示す評価関数を定義した。

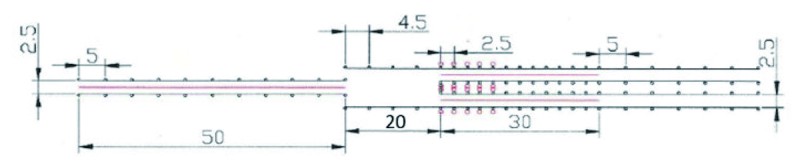
式(3)を解くことにより各パラメータを算出する。その際に使用した実験コースを図2に示す。規範操舵のパラメータを算出するために、やや緊急度が高い左右のLane Change (以下LC)を行った。条件は速度40km/hでLC開始寸前に光電でLC方向を指示した。
■ 評価指標と実車実験条件の決定
評価指標はドライバーの操舵仕事量を時系的変化で分析する。算出した式は以下の(4)式に示す(略)。
この評価方法を用いた理由は、(4) 式から W は Δθswとドライバートルク Td の操舵による要素で決まるためである。
Td は操舵系の2慣性モデル(2)と、Steering Wheel (以下SW) に取り付けられたトルクセンサの実測トルク Tser_sを用いて算出した。Td を算出する式は以下の(5)式に示す(略)。
Isw はSWの慣性モーメント係数、Csw はSW軸の減衰係数である。
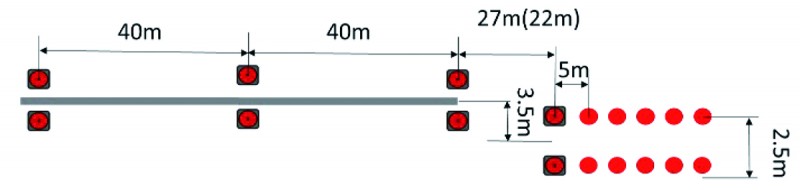
前項で紹介したSSCのモデルを用いて実験を行った。図3に Single Lane Changeコースを示す。速度は40km/hとし、LC区間は27mと22mとした。また Ka は0から0.3を0.1刻みとした。
この評価方法を用いた理由は、(4) 式から W は Δθswとドライバートルク Td の操舵による要素で決まるためである。
Td は操舵系の2慣性モデル(2)と、Steering Wheel (以下SW) に取り付けられたトルクセンサの実測トルク Tser_sを用いて算出した。Td を算出する式は以下の(5)式に示す(略)。
Isw はSWの慣性モーメント係数、Csw はSW軸の減衰係数である。
前項で紹介したSSCのモデルを用いて実験を行った。図3に Single Lane Changeコースを示す。速度は40km/hとし、LC区間は27mと22mとした。また Ka は0から0.3を0.1刻みとした。
■ 実験結果(増減の表現は絶対値である。)
LC区間27mは図4から図6より(図略)、 Ka が0.1の時は Ta のアシストによりTd が減少していた。しかし、 Ka を0.2以上ではドライバーはLCとは逆方向に、手動よりも最大値が大きいTd を入力したことが分かった。また、Wの最大値は Ka が0.1の場合は手動より減少し、0.2以上にすると最大値は手動より増加していた。W の波形はTd が正方向に増加し続けているが、ステアレートの影響で山状となっていた。
LC区間22mは図7から図9より(図略)、 Ka が0.1では Td は似た波形だったが、最大値は増加していた。ステアレートは波形の操舵が安定した。それに伴い、W は Ka が0.1の時に最も増加した。また、 Ka を0.2以上にすると、操舵開始付近ではLC方向に Ka が0.1の時より大きい Td を入力していた。しかしステアレートの変化が少なかったため、Wも増加しなかった。図10(略)から操舵開始時にTa はLC方向と逆方向に出力していた。
LC区間22mは図7から図9より(図略)、 Ka が0.1では Td は似た波形だったが、最大値は増加していた。ステアレートは波形の操舵が安定した。それに伴い、W は Ka が0.1の時に最も増加した。また、 Ka を0.2以上にすると、操舵開始付近ではLC方向に Ka が0.1の時より大きい Td を入力していた。しかしステアレートの変化が少なかったため、Wも増加しなかった。図10(略)から操舵開始時にTa はLC方向と逆方向に出力していた。
■ 結言
本研究では特定の走行条件下で、仕事量の増減の変化を分析した。Ka の評価によりSSCが適切にアシスト可能だと分かった。更に、Ka が過剰になると操舵干渉が発生する傾向も見られた。また、厳しい条件で規範ドライバーの応答性を上げる必要性も抽出できた。これらを通じて、SSCの受容性評価には操舵仕事量の時間変化による指標が有効であると検証できた。
-
 指導教員からのコメント
教授 井上 秀雄
指導教員からのコメント
教授 井上 秀雄
- バイク、クルマ好きの弦間君、貝原君は、行動力ある学生で、卒業研究においてもテンポよく進めてくれました。タイトルのシェアードコントロールとは、人間と機械が協調して、より安全な、より気持のよい運転になることを目指しています。自動運転技術を用いますが、自動運転を目的にしているわけではなく、ドライバーが運転したいとき、疲れて運転したくないときを連続的に支援する究極の高度運転支援の核となる重要研究です。2人の感性に基づく、シミュレーションでの性能推定、ドライビングシミュレータでのドライバモデルの同定、実車試験での評価指標の創出など、この高度な研究は 2人のバイタリティによって成し遂げられました。社会に出ても、2人の行動力は社会に貢献する技術を創出してくれると確信しています。
-
 卒業研究学生からの一言
弦間 一樹
卒業研究学生からの一言
弦間 一樹
- 今回の研究は、ある企業との共同研究であった。社員の方が来学なさった際に、報告書の作成方法や試験方法、社会人になった後のことなどを丁寧に教えていただいた。毎実験ごとの実験結果の分析や報告書作成を通じ、実験テーマへの理解が深まったと感じている。おかげで来年度から社会人になるが、そこでの仕事にもこの経験は必ず生きてくると実感している。また、試験ではシミュレーションと実車の両方を用いてデータを取ることができ、貴重な経験を重ねられ光栄に思っている。
- 創造工学部自動車システム開発工学科(大学サイト )
- 教員紹介ページ(大学サイト )
- 研究室ナビ(大学サイト)
